lezione 14 ponti (torsione scienza).ppt [modalità
TRANSCRIPT
LezionePONTI E GRANDI STRUTTUREProf. Pier Paolo RossiUniversità degli Studi di Catania
TORSIONE ELASTICA
Torsione elasticaIl solido di De Saint Venant
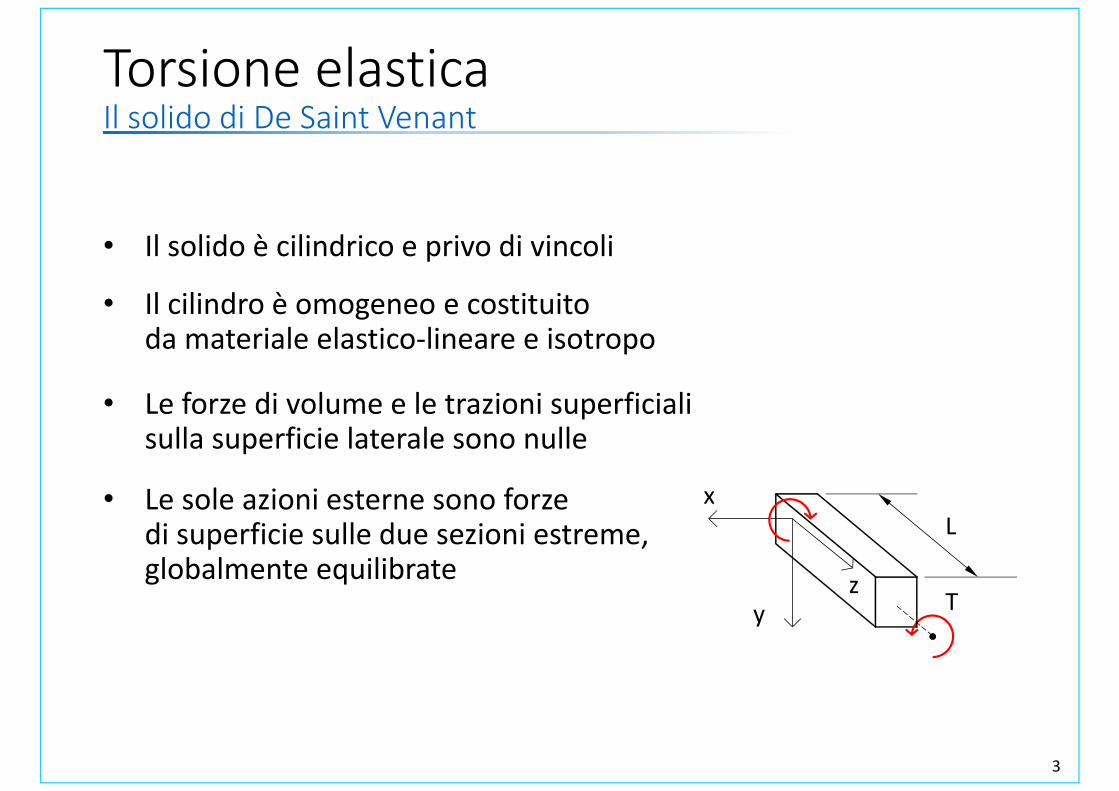
• Il solido è cilindrico e privo di vincoli
3
• Il cilindro è omogeneo e costituito da materiale elastico-lineare e isotropo
• Le forze di volume e le trazioni superficiali sulla superficie laterale sono nulle
x
yz T
L• Le sole azioni esterne sono forze
di superficie sulle due sezioni estreme, globalmente equilibrate
Torsione elasticaLa torsione secondo De Saint Venant
4
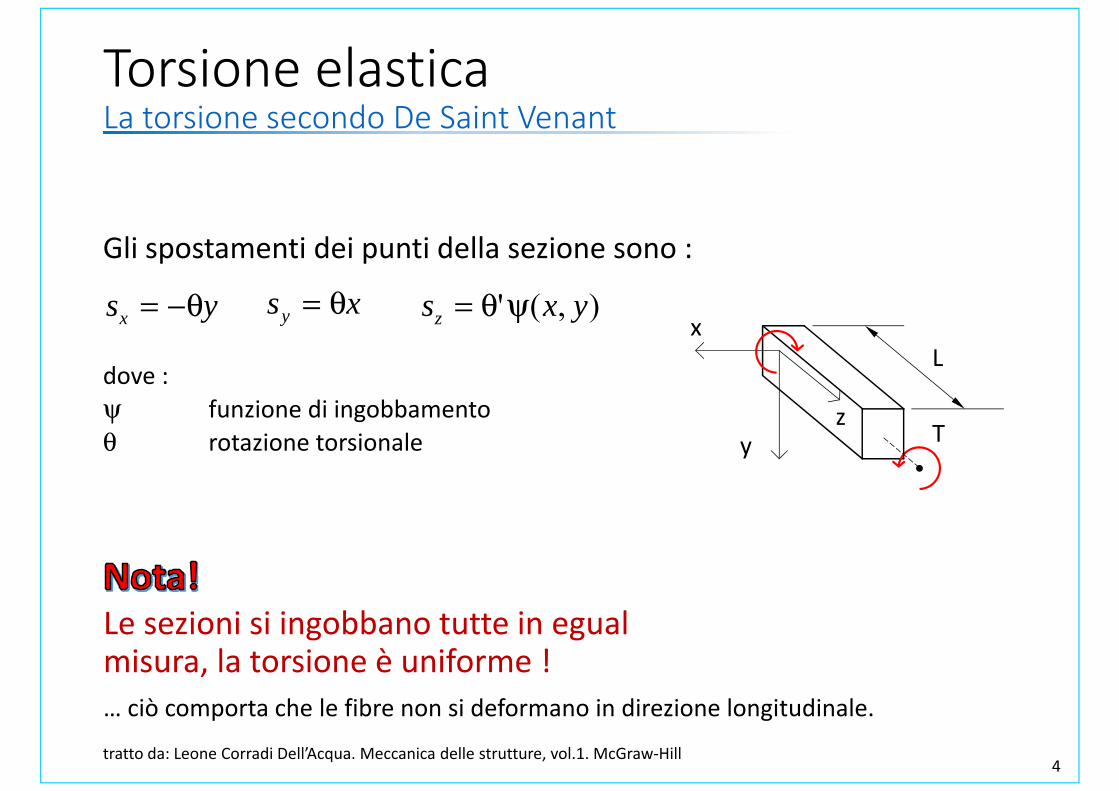
Gli spostamenti dei punti della sezione sono :
xs y= −θ ys x= θ ' ( , )zs x y= θ ψ
dove :ψ funzione di ingobbamento
Le sezioni si ingobbano tutte in egual misura, la torsione è uniforme !… ciò comporta che le fibre non si deformano in direzione longitudinale.
θ rotazione torsionale
x
yz T
L
tratto da: Leone Corradi Dell’Acqua. Meccanica delle strutture, vol.1. McGraw-Hill
Torsione elasticaLa torsione secondo De Saint Venant
5
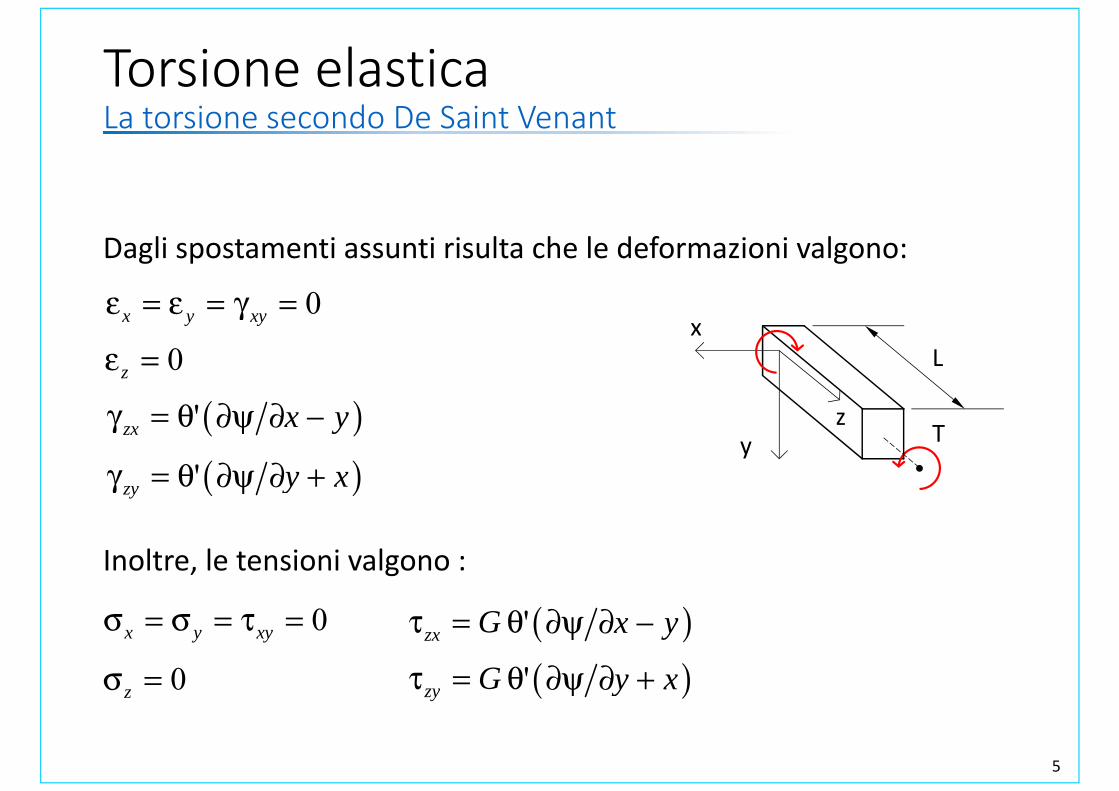
Dagli spostamenti assunti risulta che le deformazioni valgono:
0x y xyε = ε = γ =
0zε =
( )'zx x yγ = θ ∂ψ ∂ −
( )'zy y xγ = θ ∂ψ ∂ +
Inoltre, le tensioni valgono :
( )'zx G x yτ = θ ∂ψ ∂ −
( )'zy G y xτ = θ ∂ψ ∂ +
0x y xyσ = σ = τ =
0zσ =
x
yz T
L
Torsione elasticaLa torsione secondo De Saint Venant
6
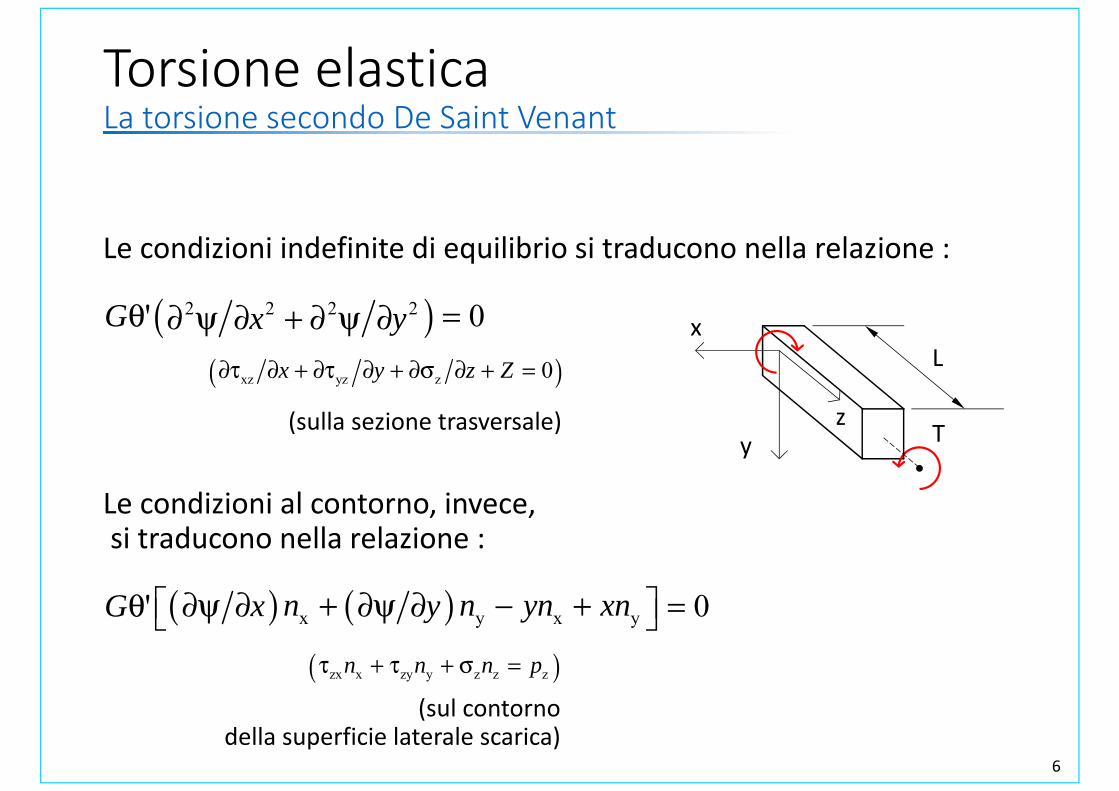
Le condizioni indefinite di equilibrio si traducono nella relazione :
( )2 2 2 2' 0G x yθ =∂ ψ ∂ + ∂ ψ ∂
(sulla sezione trasversale)
Le condizioni al contorno, invece,si traducono nella relazione :
( ) ( )x y x y' 0n n yn xnx yG + − + ∂ψ ∂ ∂ψ ∂θ =
(sul contorno della superficie laterale scarica)
( )zx x zy y z z zn n n pτ + τ + σ =
( )xz yz z 0x y z Z∂τ ∂ + ∂τ ∂ + ∂σ ∂ + =
x
yz T
L
Torsione elasticaLa torsione secondo De Saint Venant
7
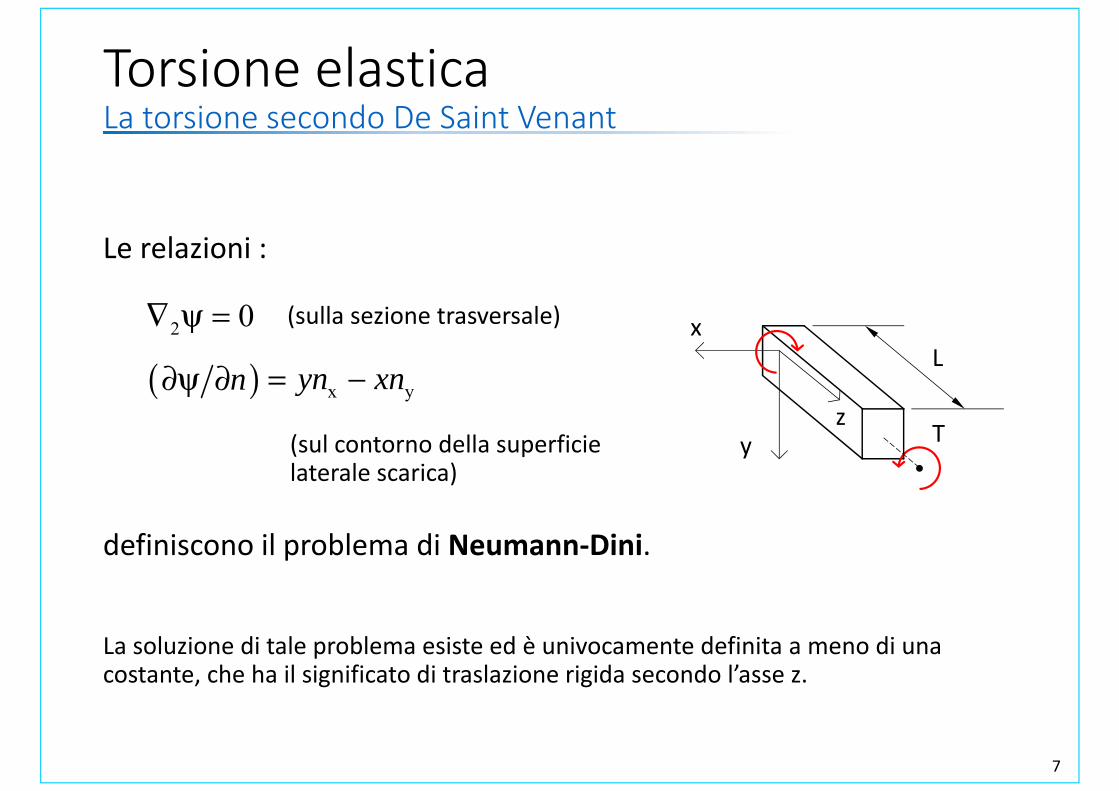
Le relazioni :
2 0∇ ψ = (sulla sezione trasversale)
( ) x yyn xnn = −∂ψ ∂
(sul contorno della superficie laterale scarica)
definiscono il problema di Neumann-Dini.
La soluzione di tale problema esiste ed è univocamente definita a meno di una costante, che ha il significato di traslazione rigida secondo l’asse z.
x
yz T
L
Torsione elasticaLa torsione secondo De Saint Venant
8
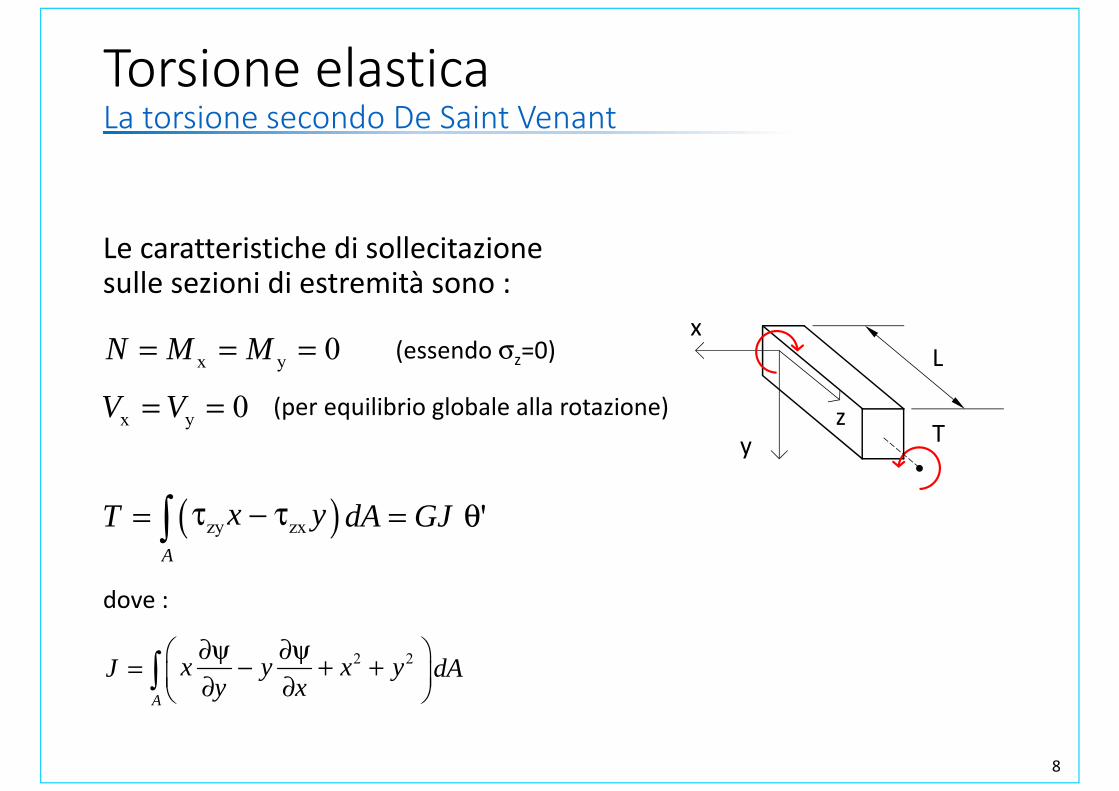
Le caratteristiche di sollecitazione sulle sezioni di estremità sono :
x y 0N M M= = = (essendo σz=0)
dove :
x y 0V V= = (per equilibrio globale alla rotazione)
( )zy zx 'A
x yT dA GJτ − τ= = θ
2 2
A
x y x yJ dAy x
∂ψ ∂ψ − + += ∂ ∂
x
yz T
L
Torsione elasticaAnalogia idrodinamica
9
Le relazioni che governano il problema della torsione presentano analogie con quelle relative ad altri fenomeni fisici.L’analogia idrodinamica considera il moto di un fluido in rotazione con vorticità uniforme in un tubo che abbia la stessa forma trasversale della sezione soggetta a torsione.
Il confronto stabilisce l’analogia tra i due fenomeni, identificando il vettore delle tensioni tangenziali con la velocità del fluido
In particolare, l’analogia idrodinamica evidenzia la maggiore efficienza torsionale di profili chiusi in parete sottile rispetto ai profili aperti. Infatti, a parità di tensioni tangenziali massime, un profilo aperto riesce ad equilibrare un momento torcente ben più elevato di quello della sezione aperta.
Torsione elasticaSezione rettangolare allungata
10
Le equazioni indefinite dell’equilibrio e di congruenza interna sono :
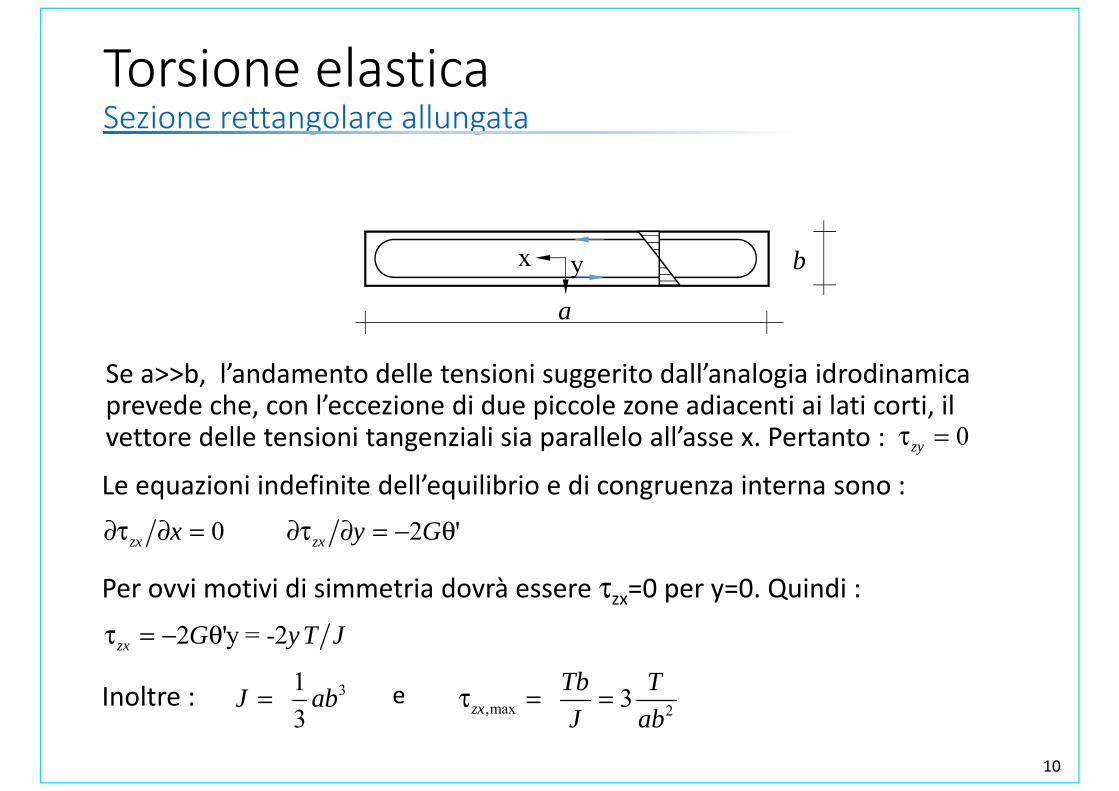
a
bx y
Se a>>b, l’andamento delle tensioni suggerito dall’analogia idrodinamica prevede che, con l’eccezione di due piccole zone adiacenti ai lati corti, il vettore delle tensioni tangenziali sia parallelo all’asse x. Pertanto : 0τ =zy
0∂τ ∂ =zx x 2 '∂τ ∂ = − θzx y G
Per ovvi motivi di simmetria dovrà essere τzx=0 per y=0. Quindi :2 'y = -2τ = − θzx G yT J
e,max 2 3τ = =zx
Tb TJ ab
31 3
=J abInoltre :
Torsione elasticaSezione rettangolare generica
11
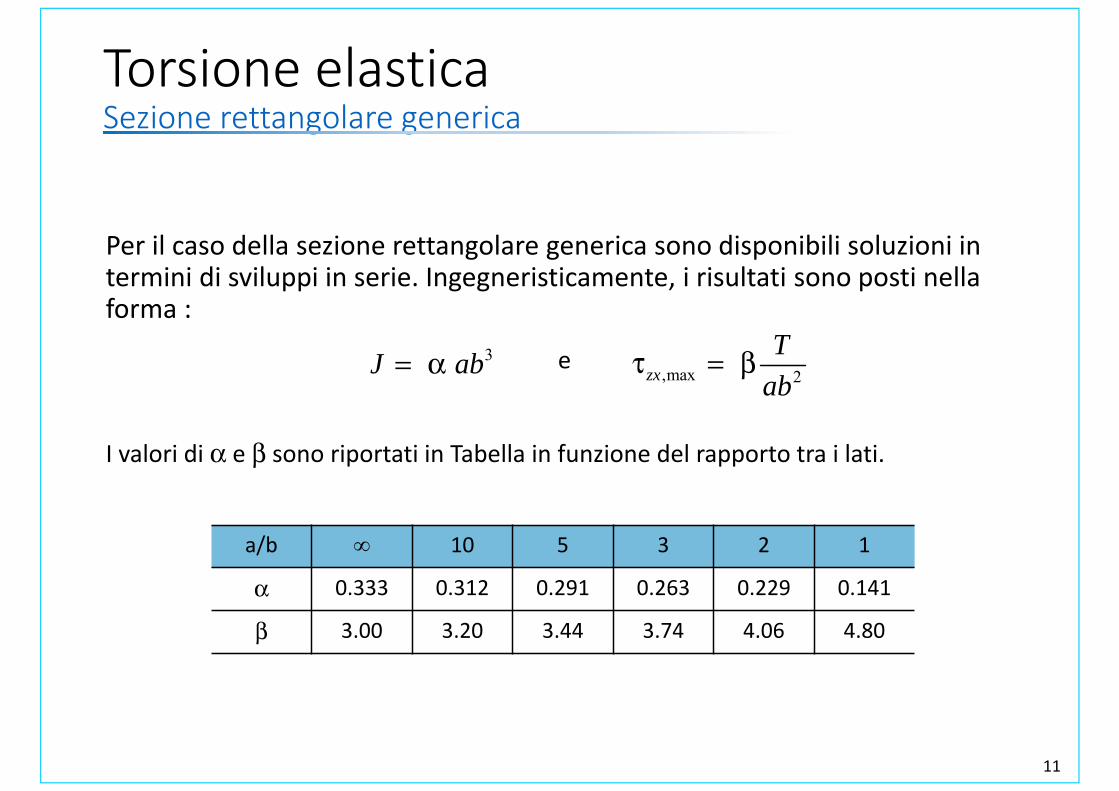
Per il caso della sezione rettangolare generica sono disponibili soluzioni in termini di sviluppi in serie. Ingegneristicamente, i risultati sono posti nella forma :
e,max 2 τ = βzx
Tab
3 = αJ ab
I valori di α e β sono riportati in Tabella in funzione del rapporto tra i lati.
a/b ∞ 10 5 3 2 1
α 0.333 0.312 0.291 0.263 0.229 0.141
β 3.00 3.20 3.44 3.74 4.06 4.80
Torsione elasticaProfili aperti a parete sottile
12
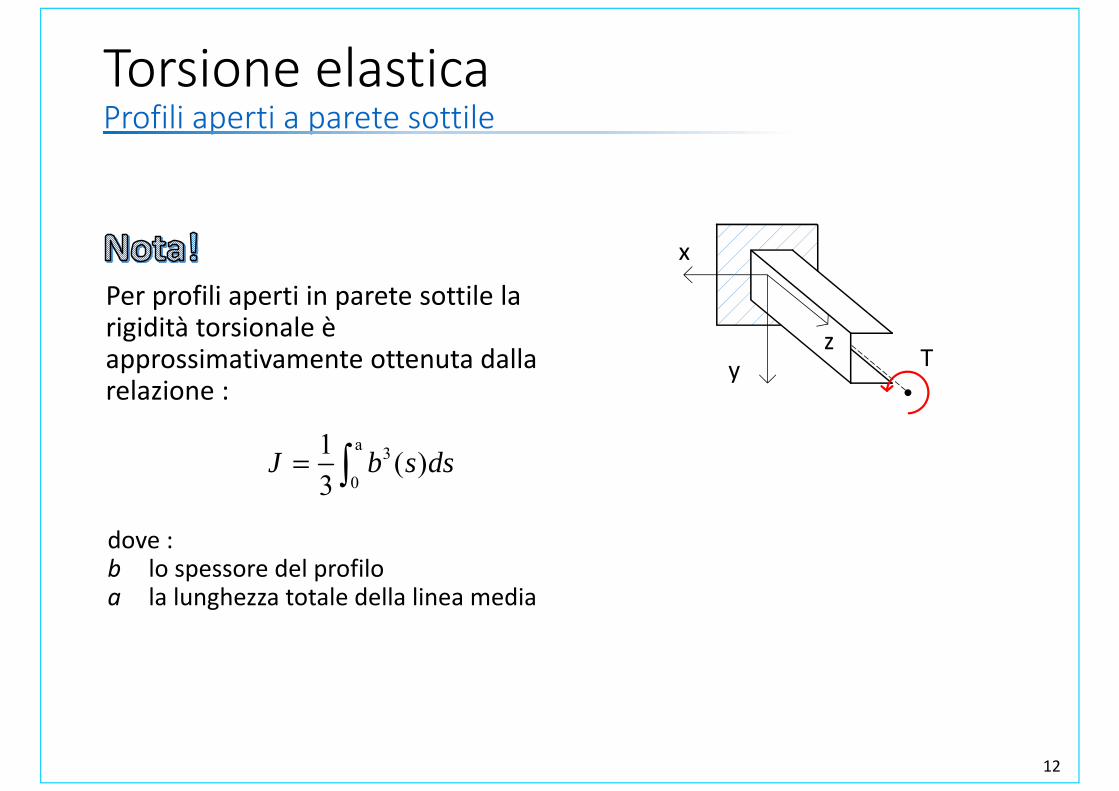
Per profili aperti in parete sottile la rigidità torsionale è approssimativamente ottenuta dalla relazione :
a 3
0
1 ( )3
= J b s ds
dove : b lo spessore del profilo a la lunghezza totale della linea media
x
yz T
Torsione elasticaProfili aperti a parete sottile
13
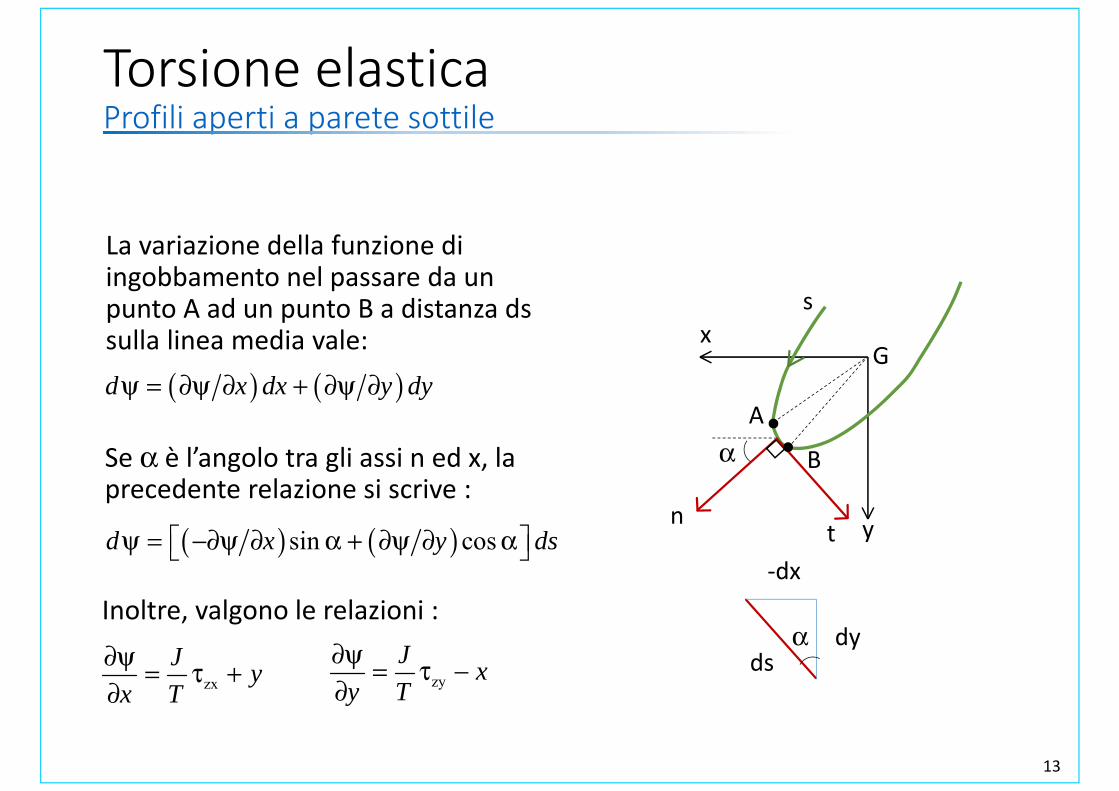
La variazione della funzione di ingobbamento nel passare da un punto A ad un punto B a distanza dssulla linea media vale:
( ) ( )ψ = ∂ψ ∂ + ∂ψ ∂d x dx y dy
Se α è l’angolo tra gli assi n ed x, la precedente relazione si scrive :
( ) ( )sin cos ψ = −∂ψ ∂ α + ∂ψ ∂ α d x y ds
Inoltre, valgono le relazioni :
zx∂ψ = τ +∂
J yx T zy
∂ψ = τ −∂
J xy T
A
s
tn
Bα
xG
y
ds
-dx
dyα
Torsione elasticaProfili aperti a parete sottile
14
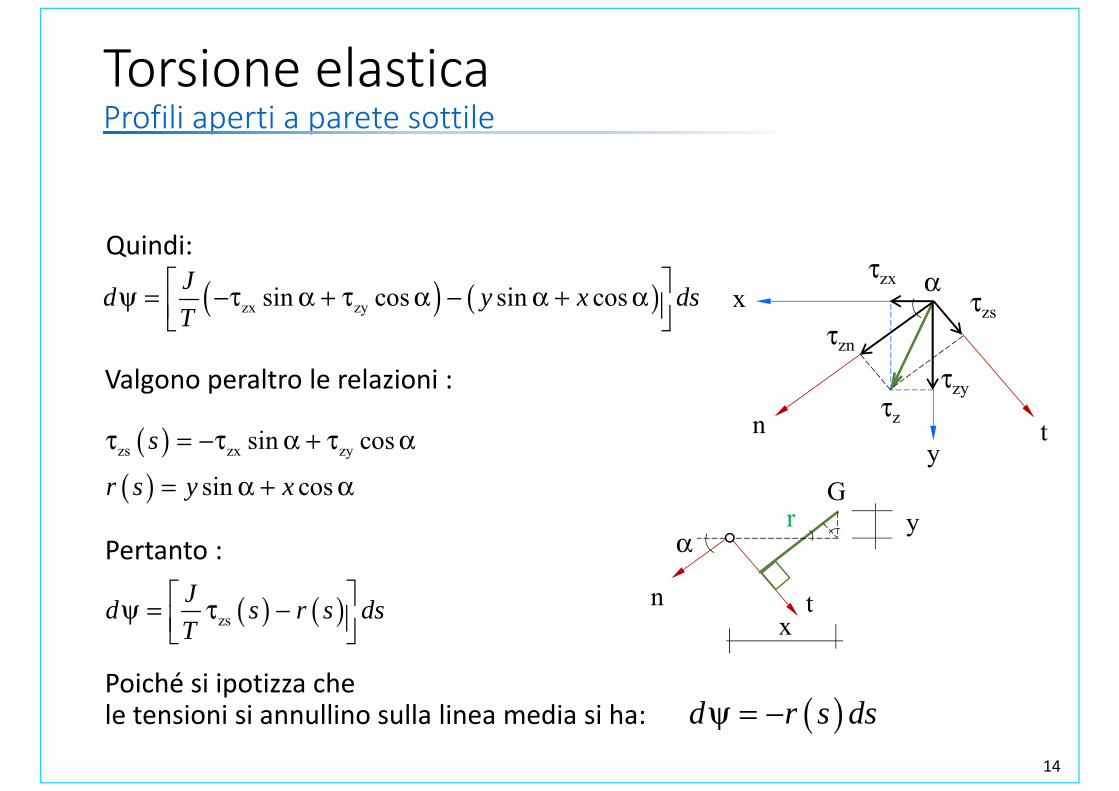
Quindi:
Valgono peraltro le relazioni :
( ) ( )zx zysin cos sin cos ψ = −τ α + τ α − α + α Jd y x dsT
Pertanto :
( )zs zx zysin cosτ = −τ α + τ αs
( ) sin cos= α + αr s y x
( ) ( )zs ψ = τ −
Jd s r s dsT
Poiché si ipotizza che le tensioni si annullino sulla linea media si ha: ( )ψ = −d r s ds
α
τz
y
x
n t
τzsτzn
τzx
τzy
n t
Gr
α
x
y
Torsione elasticaProfili aperti a parete sottile
15
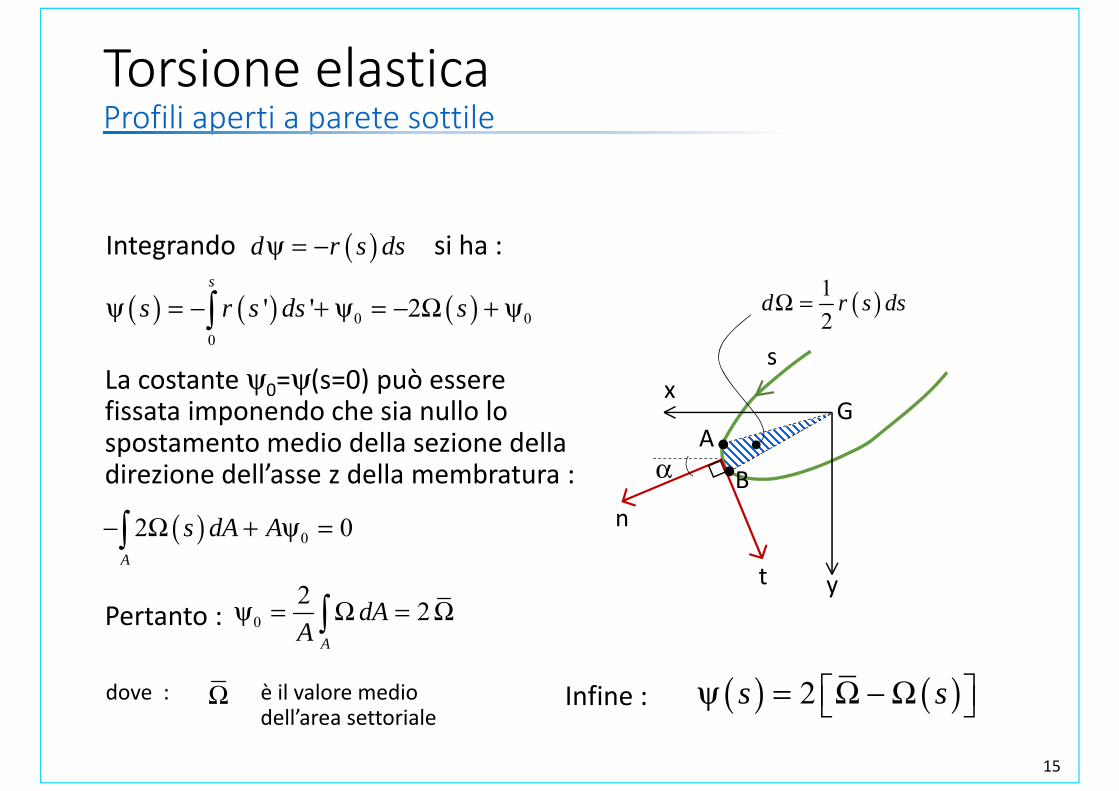
Integrando si ha :
A
xs
G
yt
nBα
La costante ψ0=ψ(s=0) può essere fissata imponendo che sia nullo lo spostamento medio della sezione della direzione dell’asse z della membratura :
( ) ( ) ( )0 00
' ' 2ψ = − + ψ = − Ω + ψs
s r s ds s
( )ψ = −d r s ds
( ) 02 0− Ω + ψ =A
s dA A
02 2ψ = Ω = Ω
A
dAAPertanto :
dove : è il valore medio dell’area settoriale
Ω Infine : ( ) ( )2 ψ = Ω − Ω s s
( )12
Ω =d r s ds
Torsione elasticaProfili chiusi a parete sottile
16
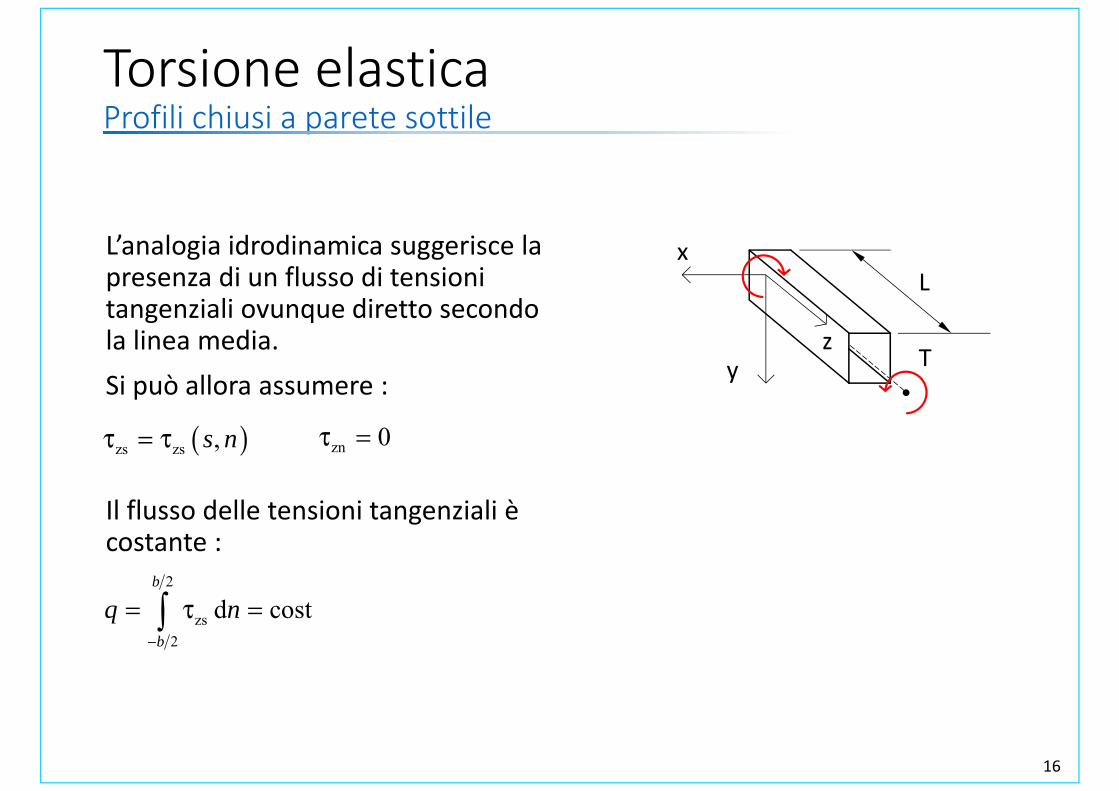
L’analogia idrodinamica suggerisce la presenza di un flusso di tensioni tangenziali ovunque diretto secondo la linea media.
x
yz T
L
( )zs zs ,τ = τ s n zn 0τ =
Il flusso delle tensioni tangenziali è costante :
2
zs2
d cost−
= τ =b
b
q n
Si può allora assumere :
Torsione elasticaProfili chiusi a parete sottile
17
x
yz T
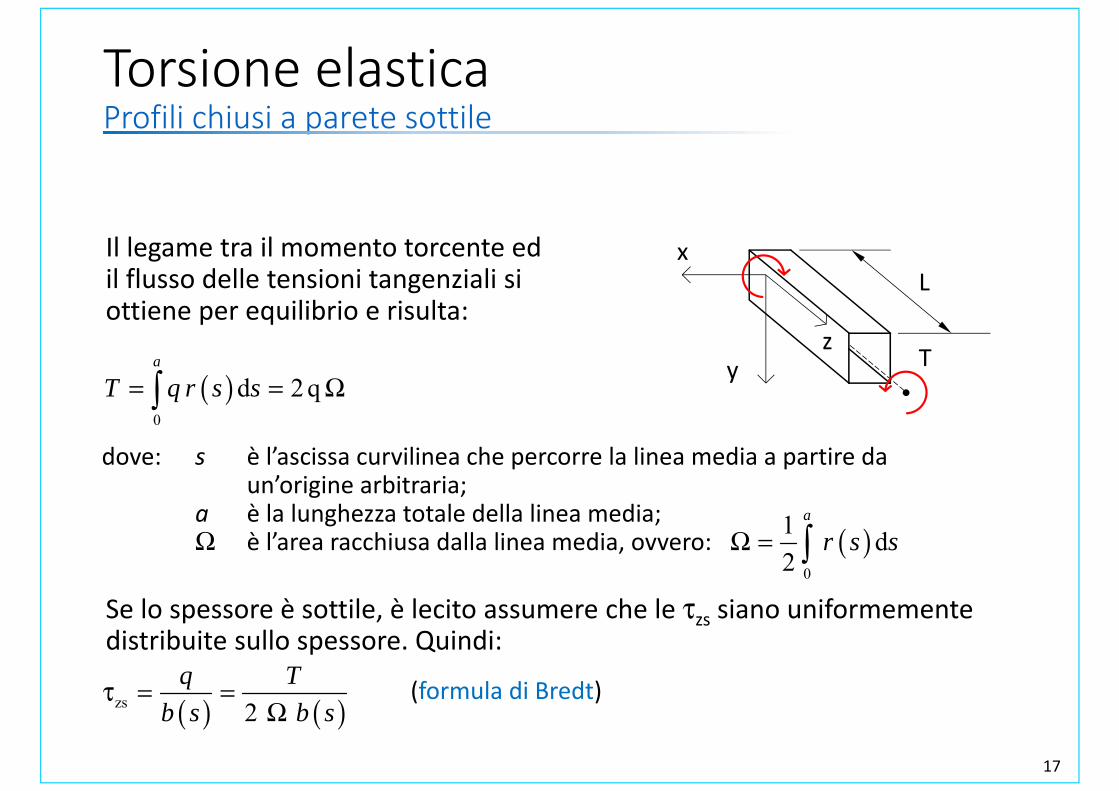
LIl legame tra il momento torcente ed il flusso delle tensioni tangenziali si ottiene per equilibrio e risulta:
( )0
d 2 q= = Ωa
T q r s s
dove: s è l’ascissa curvilinea che percorre la linea media a partire da un’origine arbitraria;
a è la lunghezza totale della linea media;Ω è l’area racchiusa dalla linea media, ovvero: ( )
0
1 d2
Ω = a
r s s
Se lo spessore è sottile, è lecito assumere che le τzs siano uniformemente distribuite sullo spessore. Quindi:
( ) ( )zs 2τ = =
Ωq T
b s b s(formula di Bredt)
Torsione elasticaProfili chiusi a parete sottile
18
x
yz T
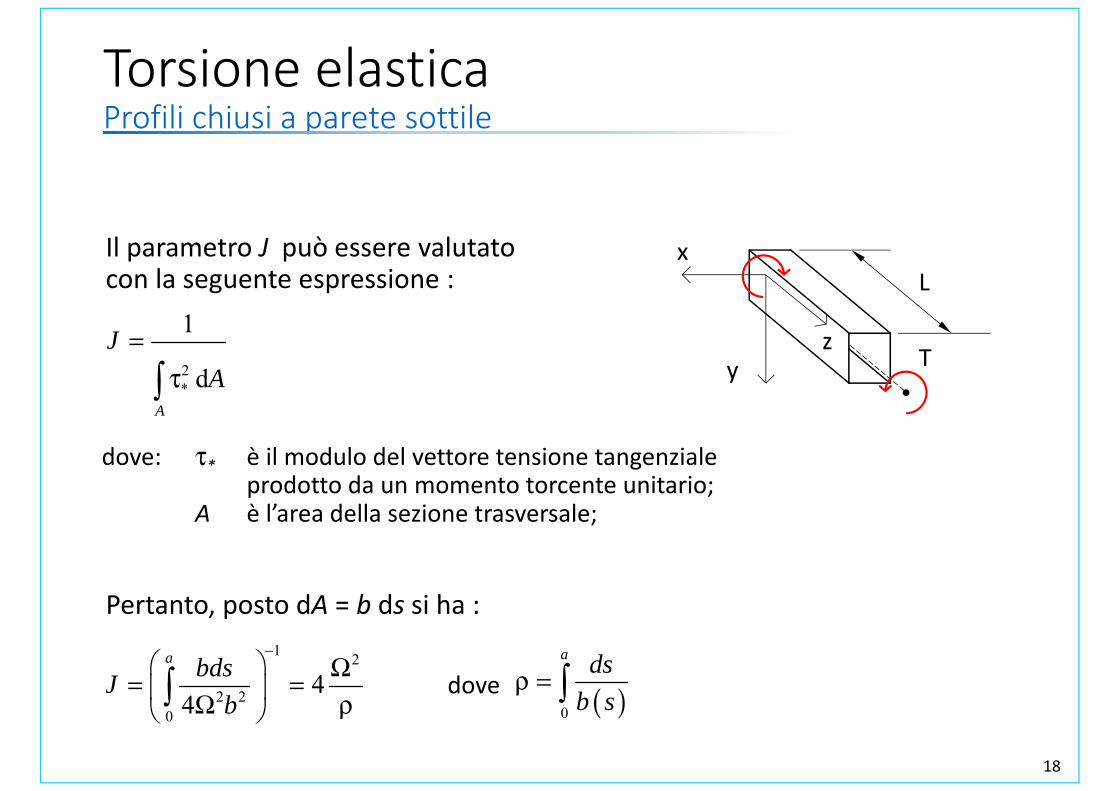
LIl parametro J può essere valutato con la seguente espressione :
2*
1
d=
τA
JA
dove: τ* è il modulo del vettore tensione tangenziale prodotto da un momento torcente unitario;
A è l’area della sezione trasversale;
Pertanto, posto dA = b ds si ha :1 2
2 20
44
− Ω= = Ω ρ a bdsJ
bdove ( )0
ρ = a ds
b s
Torsione elasticaProfili chiusi a parete sottile
19
x
yz T
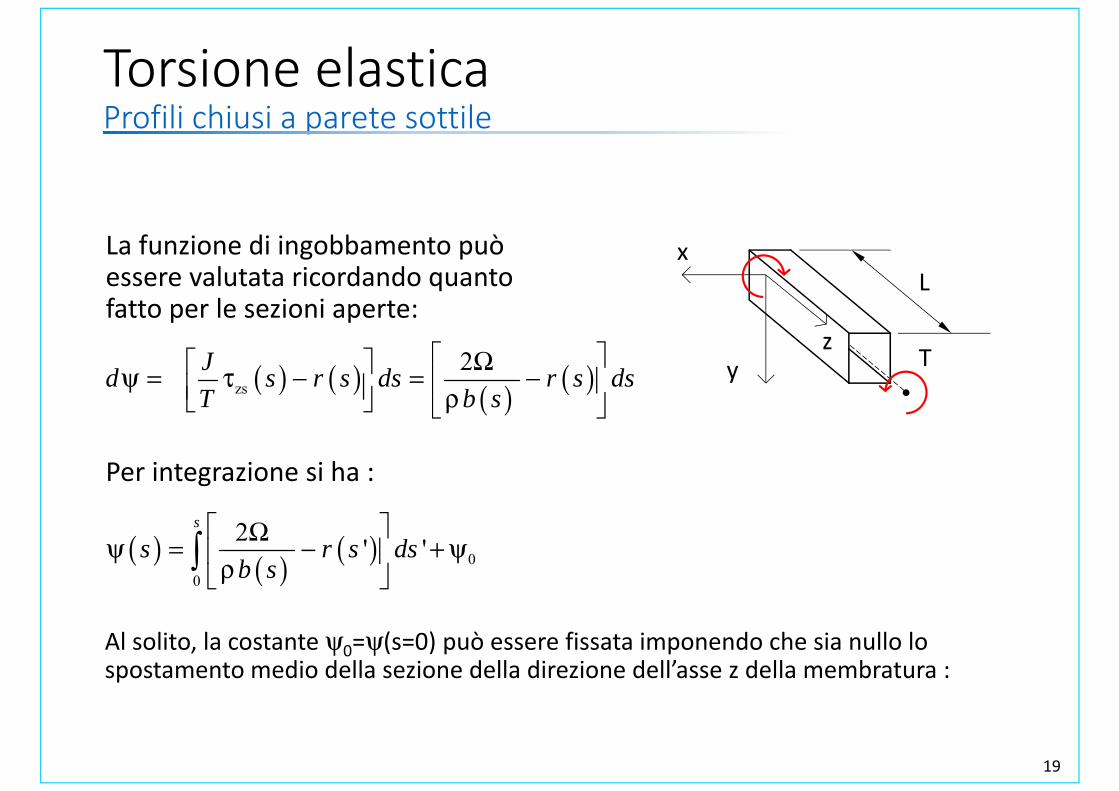
LLa funzione di ingobbamento può essere valutata ricordando quanto fatto per le sezioni aperte:
( ) ( ) ( ) ( )zs2 Ω ψ = τ − = − ρ
Jd s r s ds r s dsT b s
Per integrazione si ha :
( ) ( ) ( ) 00
2 ' ' Ωψ = − + ψ ρ s
s r s dsb s
Al solito, la costante ψ0=ψ(s=0) può essere fissata imponendo che sia nullo lo spostamento medio della sezione della direzione dell’asse z della membratura :
Torsione elasticaTeoria di Timoshenko - Vlasov
20
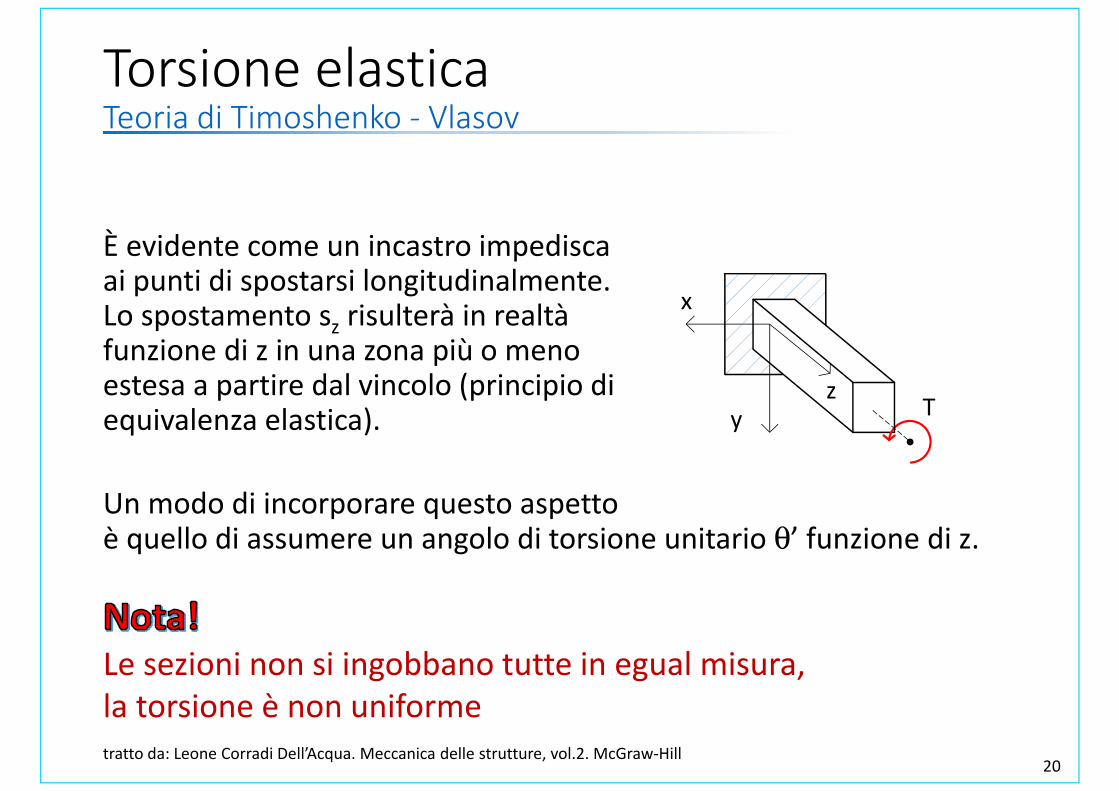
È evidente come un incastro impedisca ai punti di spostarsi longitudinalmente. Lo spostamento sz risulterà in realtà funzione di z in una zona più o meno estesa a partire dal vincolo (principio di equivalenza elastica).
Un modo di incorporare questo aspetto è quello di assumere un angolo di torsione unitario θ’ funzione di z.
Le sezioni non si ingobbano tutte in egual misura, la torsione è non uniformetratto da: Leone Corradi Dell’Acqua. Meccanica delle strutture, vol.2. McGraw-Hill
x
yz T
Torsione elasticaTeoria di Timoshenko - Vlasov
21
[ ]( ) ( )x cs z y s y= −θ − [ ]( ) ( )y cs z x s x= θ − '(z) ( )zs s= θ ψ
L’espressione degli spostamenti diviene:
xc yc coordinate del centro di taglio nel riferimento principale della sezionedove :
L’espressione di sz = θ’(z) ψ(s) dipende da z, quindi ….
( ) ''(z)zz
s sz
∂ε = = ψ θ∂
le fibre subiscono deformazioni dirette in senso longitudinale :
Torsione elasticaTeoria di Timoshenko - Vlasov
22
La presenza di deformazioni longitudinalicomporta la presenza di tensioni normali σz :
( ) ( ) ''(z)zz E E sσ = ε = ψ θ
Torsione elasticaLa funzione di ingobbamento
23
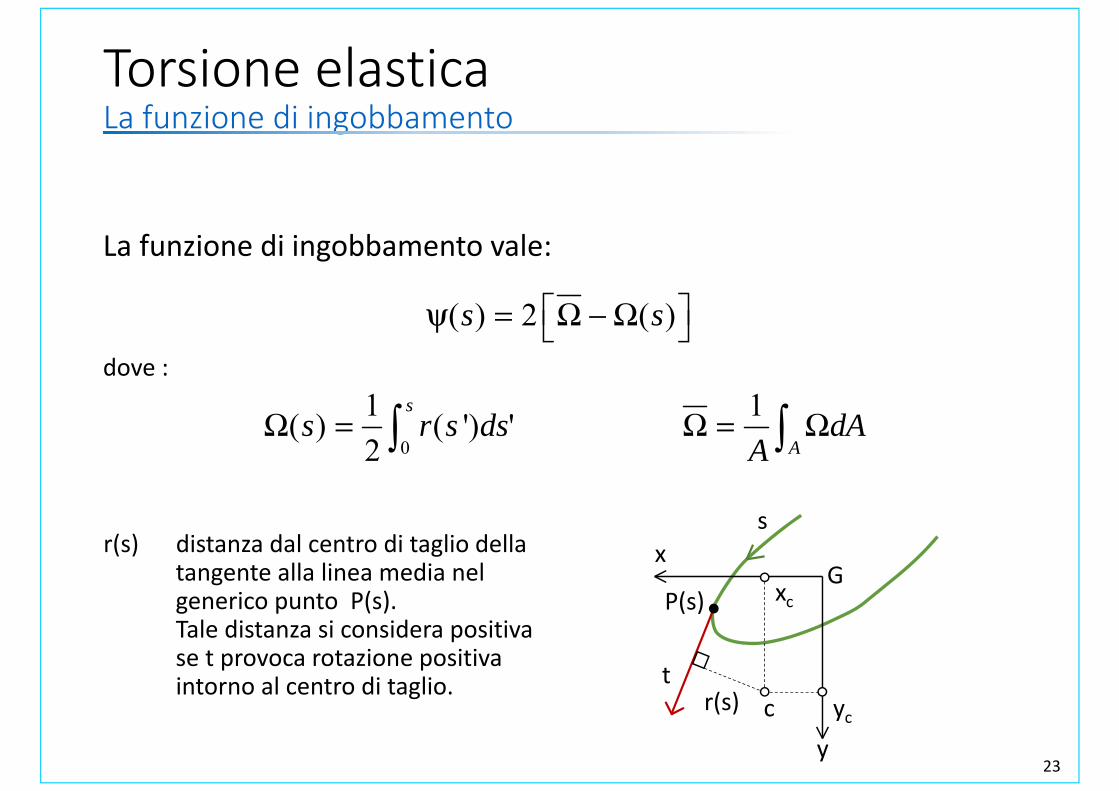
La funzione di ingobbamento vale:
( ) 2 ( )s s ψ = Ω − Ω
0
1( ) ( ') '2
ss r s dsΩ =
1A
dAA
Ω = Ω
r(s) distanza dal centro di taglio della tangente alla linea media nel generico punto P(s). Tale distanza si considera positiva se t provoca rotazione positiva intorno al centro di taglio.
cr(s)
P(s)
xxc
s
G
yc
y
t
dove :
Torsione elasticaLa funzione di ingobbamento
24
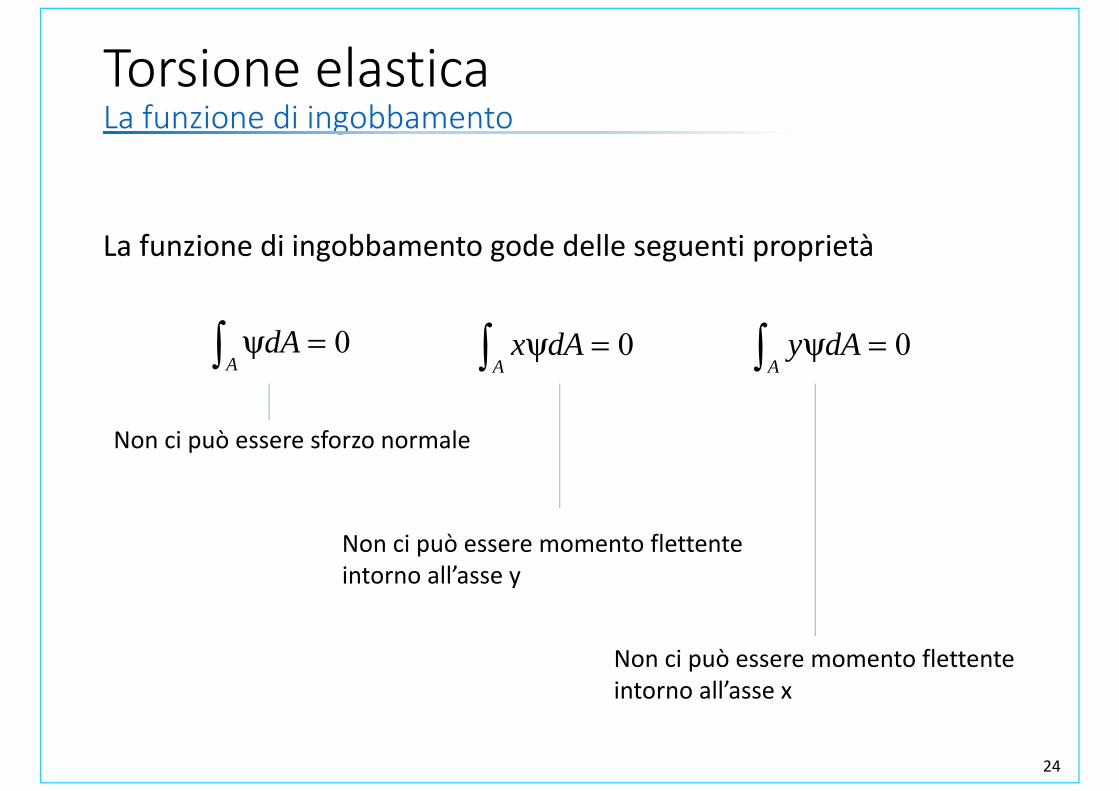
La funzione di ingobbamento gode delle seguenti proprietà
0A
dAψ = 0A
x dAψ = 0A
y dAψ =
Non ci può essere sforzo normale
Non ci può essere momento flettente intorno all’asse y
Non ci può essere momento flettente intorno all’asse x
Torsione elasticaLa funzione di ingobbamento
25
Le σz devono quindi costituire uno stato di autotensione, corrispondente ad azione assiale e momenti flettenti nulli.
'' 0zA AN dA E dA= σ = θ ψ =
x '' 0zA AM y dA E y dA= σ = θ ψ =
y '' 0zA AM x dA E x dA= − σ = − θ ψ =
Avendo assunto il centro di rotazione come centro di taglio, questa proprietà risulta verificata :
Torsione elasticaTeoria di Timoshenko - Vlasov
26
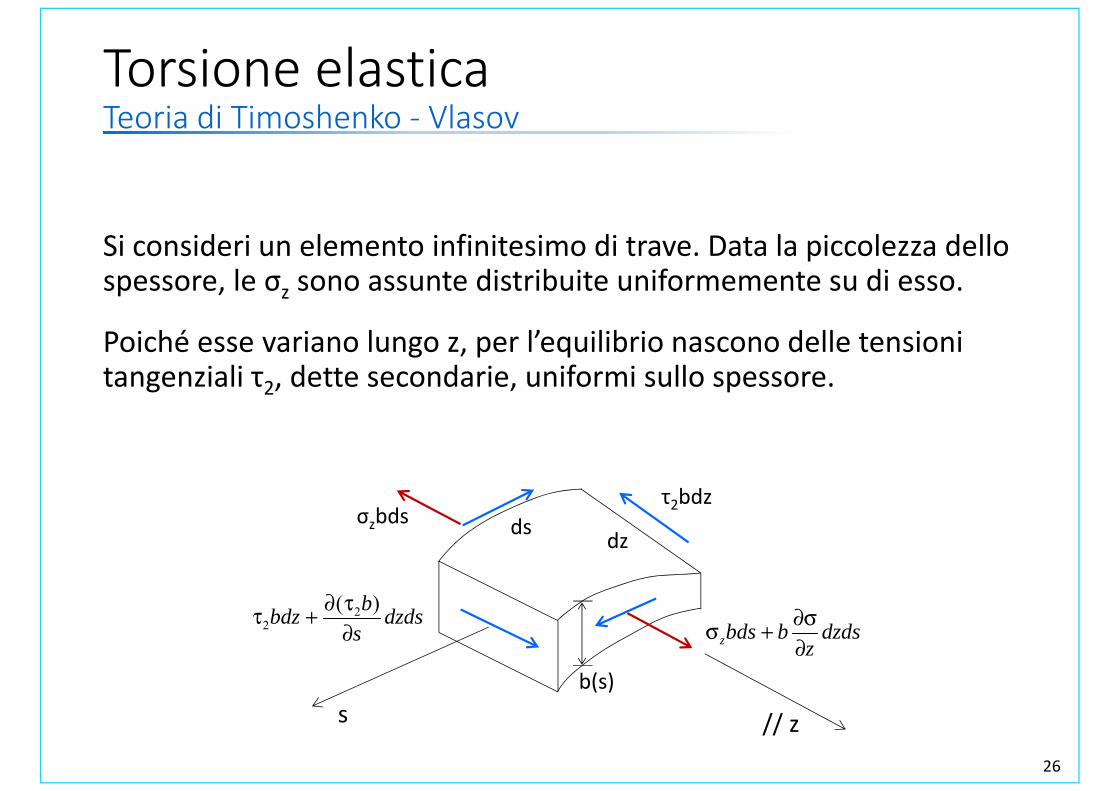
Si consideri un elemento infinitesimo di trave. Data la piccolezza dello spessore, le σz sono assunte distribuite uniformemente su di esso.
Poiché esse variano lungo z, per l’equilibrio nascono delle tensioni tangenziali τ2, dette secondarie, uniformi sullo spessore.
σzbds ds dz
τ2bdz
b(s)
zbds b dzdsz
∂σσ +∂
22
( )∂ ττ +∂
bbdz dzdss
// zs
Torsione elasticaTeoria di Timoshenko - Vlasov
27
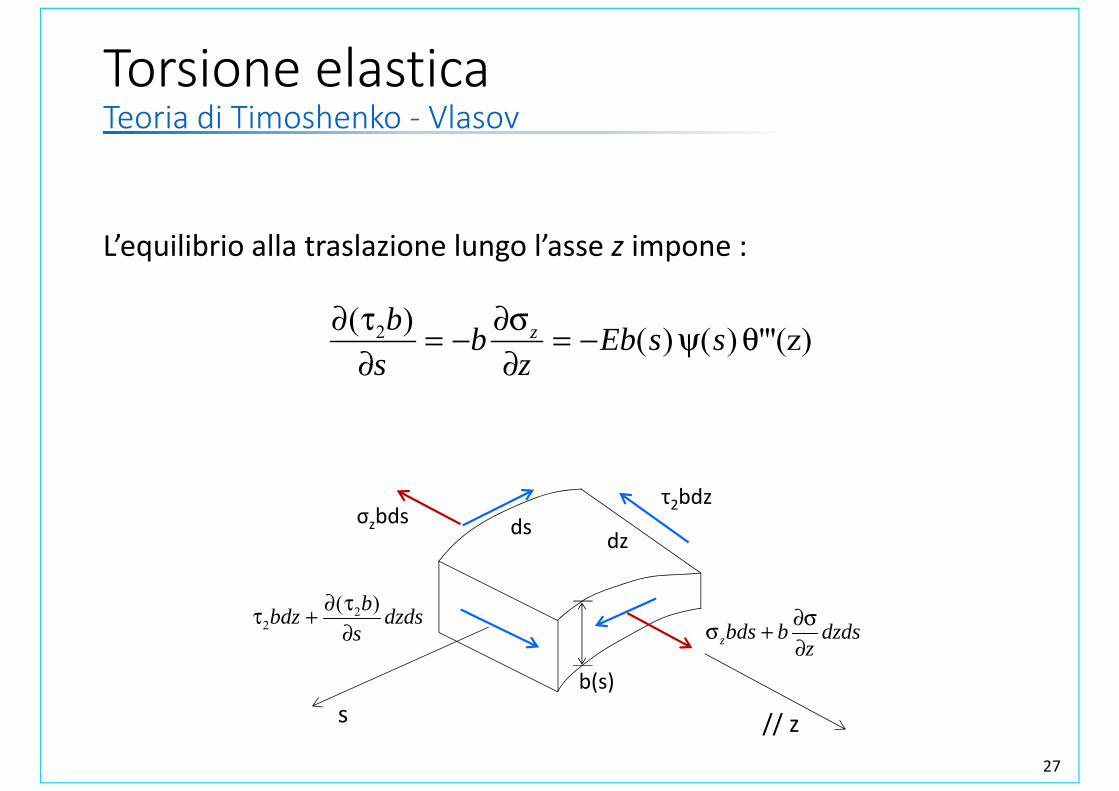
L’equilibrio alla traslazione lungo l’asse z impone :
2( ) ( ) ( ) '''(z)zb b Eb s ss z
∂ τ ∂σ= − = − ψ θ∂ ∂
σzbds ds dz
τ2bdz
zbds b dzdsz
∂σσ +∂
22
( )∂ ττ +∂
bbdz dzdss
// zsb(s)
Torsione elasticaTeoria di Timoshenko - Vlasov
28
Il flusso q=τ2b delle tensioni tangenziali secondarie attraverso lo spessore può essere calcolato integrando la precedente relazione.
2 0( , ) '''(z) ( ') ( ') '
sq s z b E b s s ds= τ = − θ ψ
A tale flusso non corrispondono azioni taglianti.
Se la superficie laterale è scarica, agli estremi liberi della sezione per l’equilibrio deve essere τ2=0.
La costante di integrazione è quindi nulla e si ottiene :
Torsione elasticaTeoria di Timoshenko - Vlasov
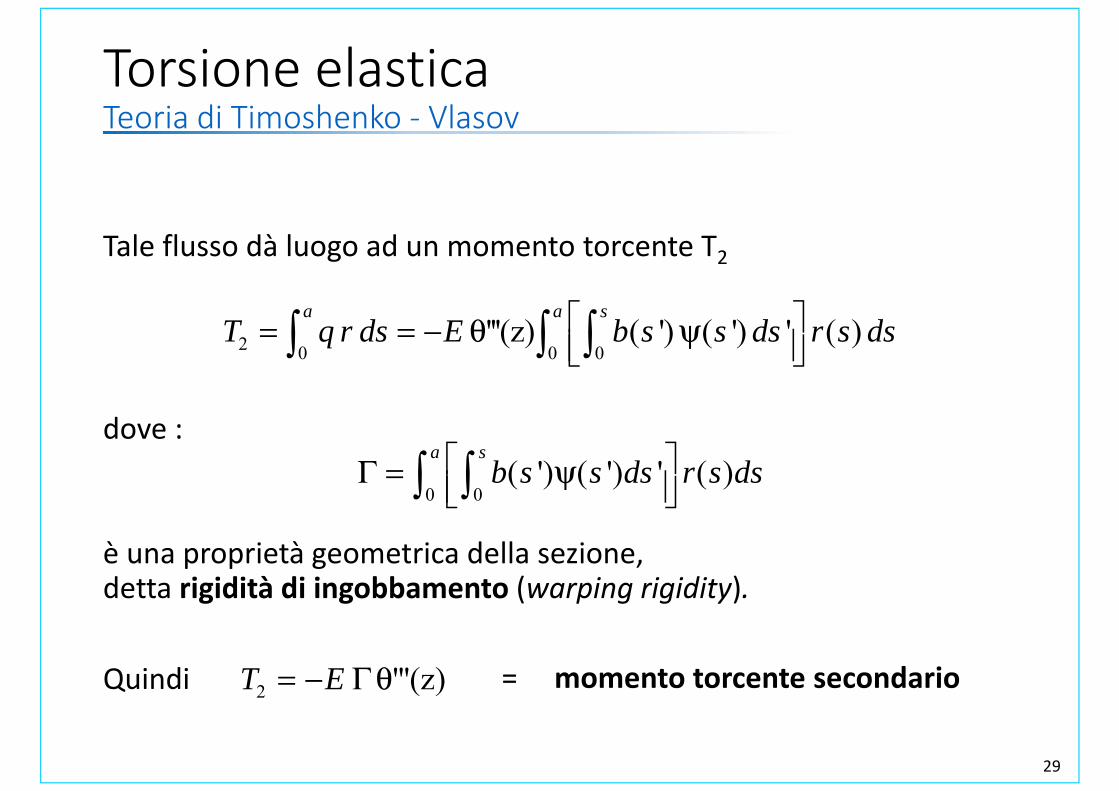
29
dove :
2 0 0 0'''(z) ( ') ( ') ' ( )
a a sT q r ds E b s s ds r s ds = = − θ ψ
0 0( ') ( ') ' ( )
a sb s s ds r s ds Γ = ψ
Tale flusso dà luogo ad un momento torcente T2
è una proprietà geometrica della sezione, detta rigidità di ingobbamento (warping rigidity).
Quindi 2 '''(z)T E= − Γ θ = momento torcente secondario
Torsione elasticaTeoria di Timoshenko - Vlasov
30
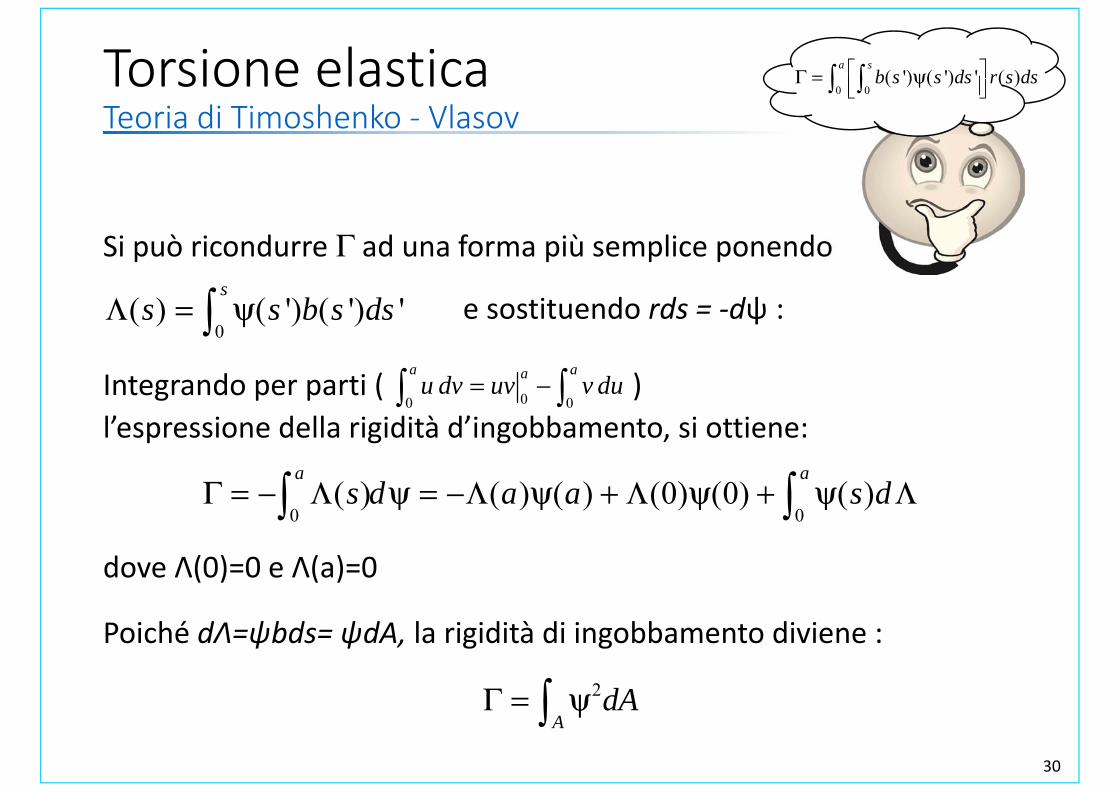
Si può ricondurre Γ ad una forma più semplice ponendo
0( ) ( ') ( ') '
ss s b s dsΛ = ψ
Integrando per parti ( ) l’espressione della rigidità d’ingobbamento, si ottiene:
0 0( ) ( ) ( ) (0) (0) ( )
a as d a a s dΓ = − Λ ψ = −Λ ψ + Λ ψ + ψ Λ
dove Λ(0)=0 e Λ(a)=0
00 0= −
a aau dv uv v du
Poiché dΛ=ψbds= ψdA, la rigidità di ingobbamento diviene :2
AdAΓ = ψ
e sostituendo rds = -dψ :
0 0( ') ( ') ' ( )
a sb s s ds r s ds Γ = ψ
Torsione elasticaTeoria di Timoshenko - Vlasov
31
Il momento torcente secondario T2rappresenta il contributo degli effetti del vincolo.
I due contributi hanno importanza relativa diversa nelle diverse sezioni. L’effetto del vincolo diminuisce con la distanza dal vincolo stesso.
1 2 '(z) '''(z)T T T GJ E= + = θ − Γ θ
Sommato al momento primario T1 , corrispondente alle tensioni tangenziali date dalla soluzione di De Saint Venant, equilibra in ogni sezione la coppia applicata all’estremo della mensola :
Derivando l’equazione fondamentale della torsione, si ottiene :
Torsione elasticaTeoria di Timoshenko - Vlasov
32
E’ possibile estendere i risultati anche ad una trave soggetta a momento torcente distribuito mt per unità di lunghezza.Per l’equilibrio alla rotazione di un elemento infinitesimo di trave si ha :
( ) '(z) '''(z)T z G J E= θ − Γθ
tdT dz m= −
t '''' (z) ''(z)m E G J= Γ θ − θ
Questa equazione differenziale, lineare a coefficienti constanti, governa il comportamento torsionale dei profili aperti. Il suo integrale generale dipende da quattro costanti di integrazione, determinate dalle condizioni al contorno.
Torsione elasticaSezione a I
33
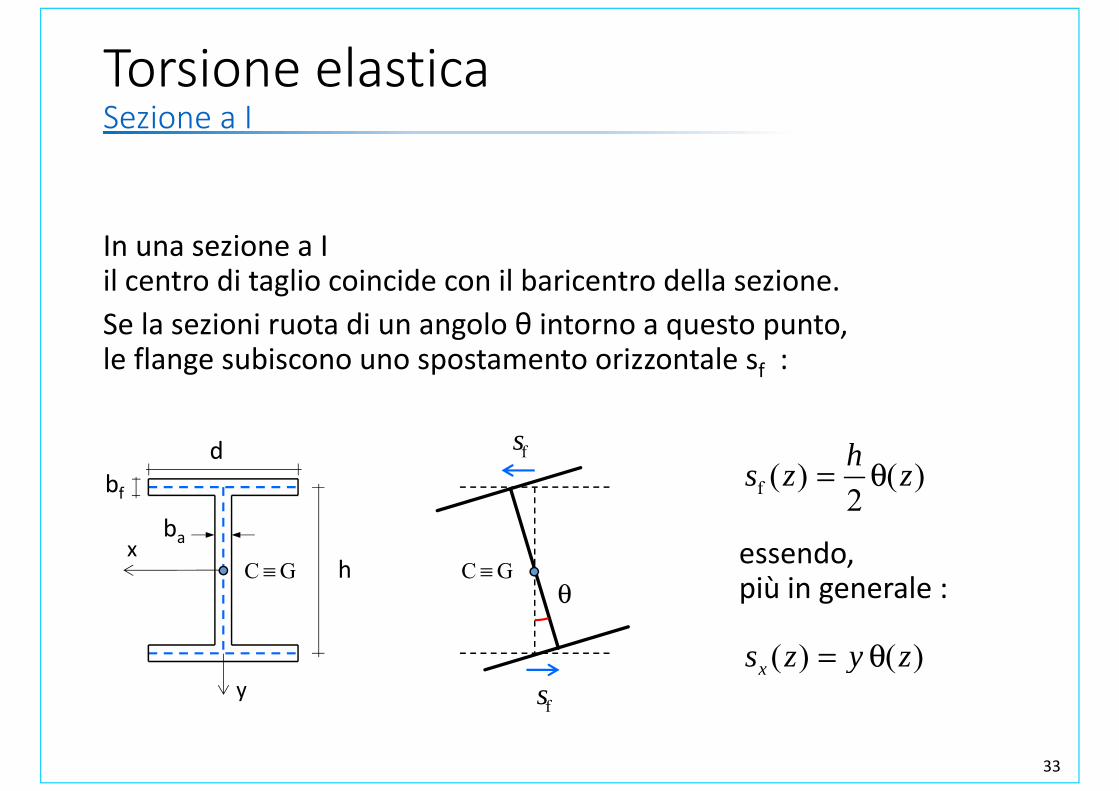
In una sezione a I il centro di taglio coincide con il baricentro della sezione.Se la sezioni ruota di un angolo θ intorno a questo punto, le flange subiscono uno spostamento orizzontale sf :
dbf
x
y
hba
θ
fs
fs
f ( ) ( )2hs z z= θ
( ) ( )xs z y z= θ
C G≡essendo, più in generale :C G≡
Torsione elasticaSezione a I
34
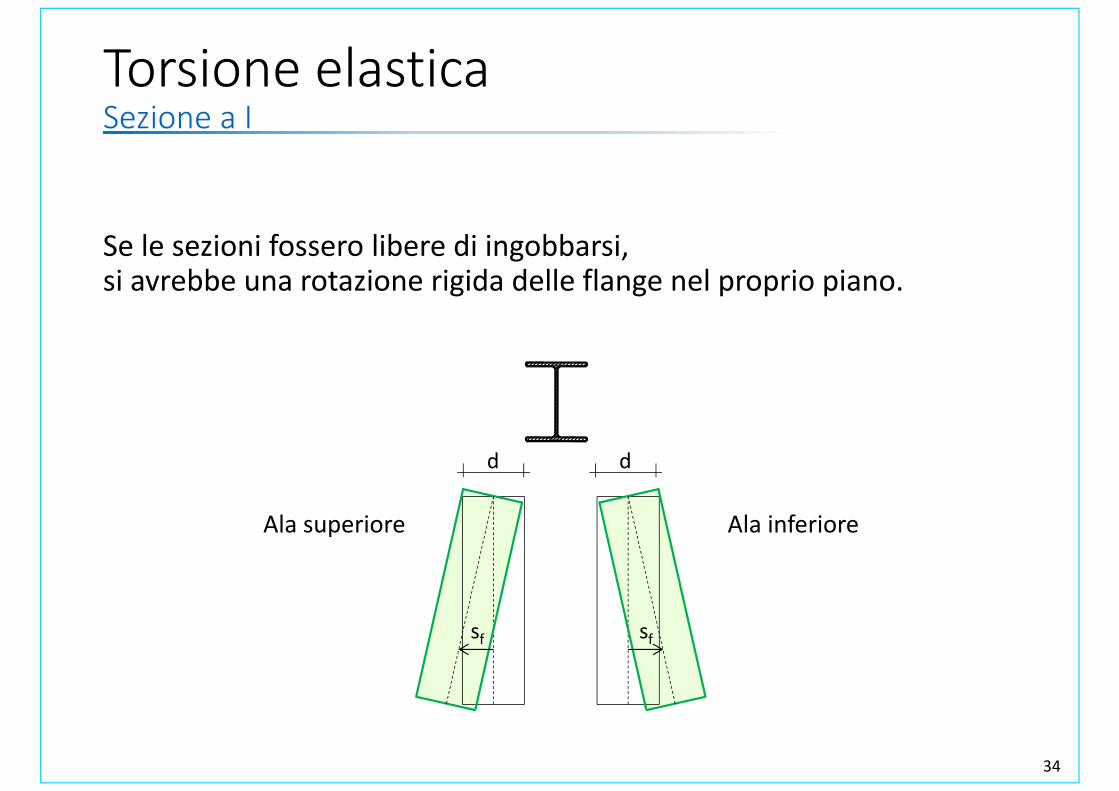
Se le sezioni fossero libere di ingobbarsi, si avrebbe una rotazione rigida delle flange nel proprio piano.
d
sf sf
d
Ala superiore Ala inferiore
Torsione elasticaSezione a I
35
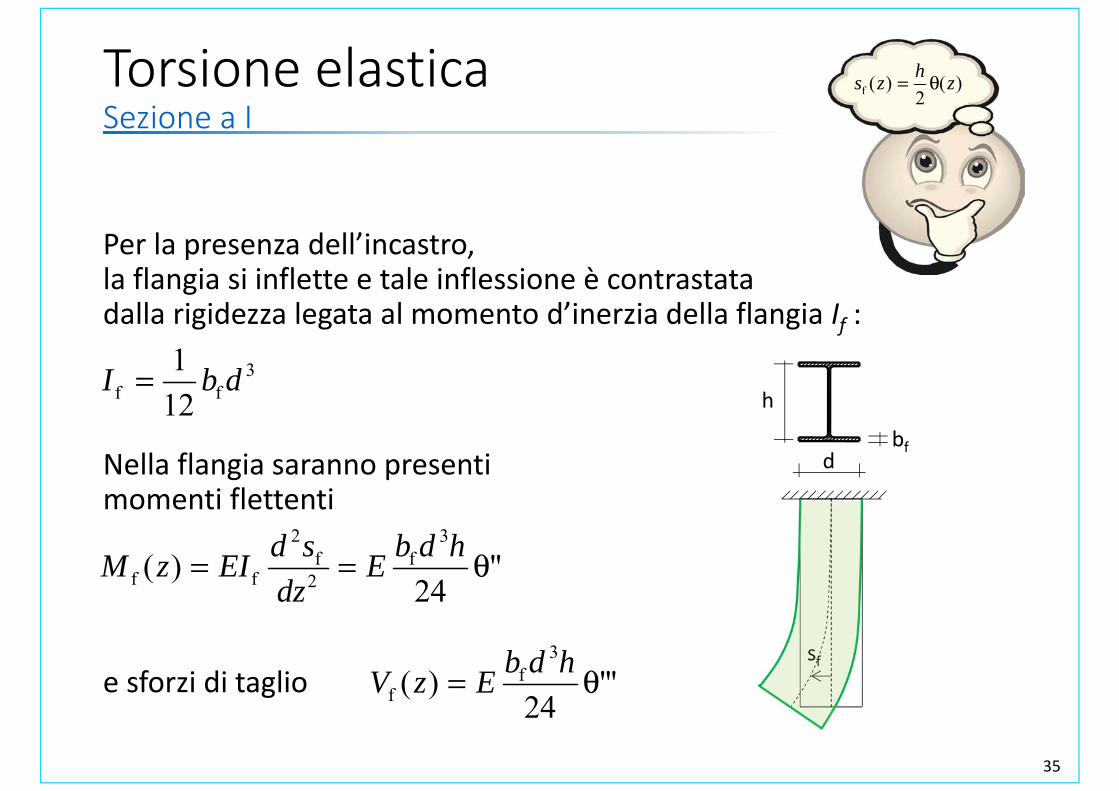
3f f
112
I b d=
sf
2 3f f
f f 2( ) ''24
d s b d hM z EI Edz
= = θ
Per la presenza dell’incastro, la flangia si inflette e tale inflessione è contrastata dalla rigidezza legata al momento d’inerzia della flangia If :
Nella flangia saranno presenti momenti flettenti
dbf
e sforzi di taglio3
ff ( ) '''
24b d hV z E= θ
h
f ( ) ( )2hs z z= θ
Torsione elasticaSezione a I
36
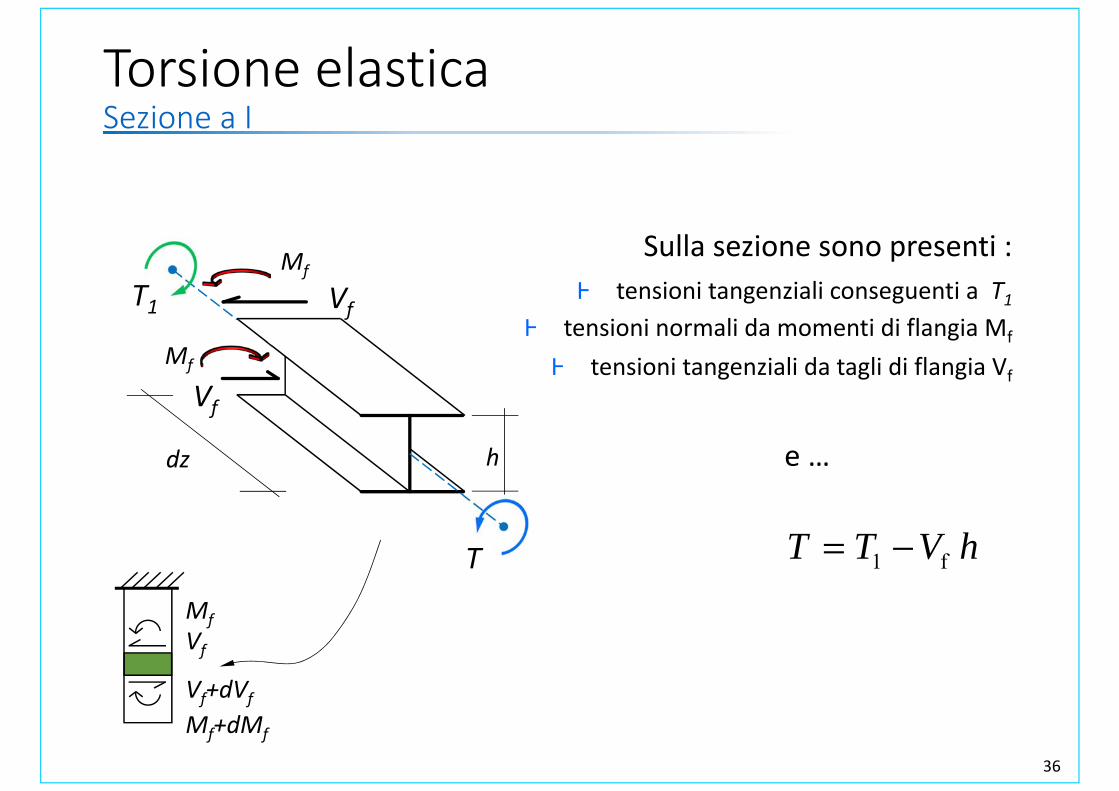
1 fT T V h= −
Sulla sezione sono presenti :Vf
h
Mf
Vf
Mf
T1
T
dz
Ⱶ tensioni tangenziali conseguenti a T1
Ⱶ tensioni normali da momenti di flangia Mf
Ⱶ tensioni tangenziali da tagli di flangia Vf
e …
Vf
Mf
Vf+dVf
Mf+dMf
Torsione elasticaSezione a I
37
… il secondo addendo è il momento torcente secondario :
3 2f
24b d hΓ =
2 f( ) ( ) '''(z)T z V z h E= − = − Γ θdove :
è la rigidità di ingobbamento per la sezione ad I
1 '(z)T G J= θ
Il primo addendo è il momento torcente secondo De Saint Venant :
( )3 3a f
1 23
J h b d b= +
dove :
è la rigidità torsionale primaria per la sezione ad I
Torsione elasticaSezione a I
38
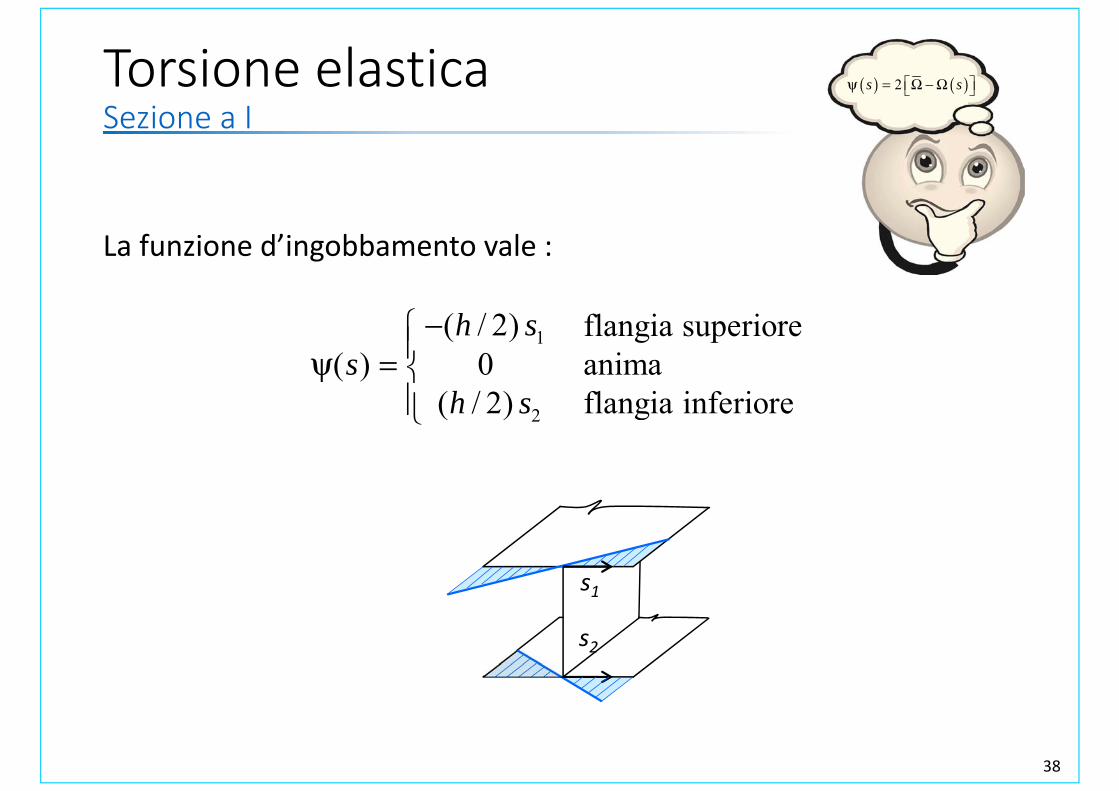
La funzione d’ingobbamento vale :
1
2
( / 2) flangia superiore( ) 0 anima
( / 2) flangia inferiore
h ss
h s
−ψ =
s1
s2
( ) ( )2s s ψ = Ω − Ω
Torsione elasticaSezione a I
39
Si definisce bimomento la quantità :
''B E= Γ θ
Nella sezione a I, il bimomento è pari al prodotto dei momenti di flangia per la distanza tra le flange stesse, ovvero :
fB M h=
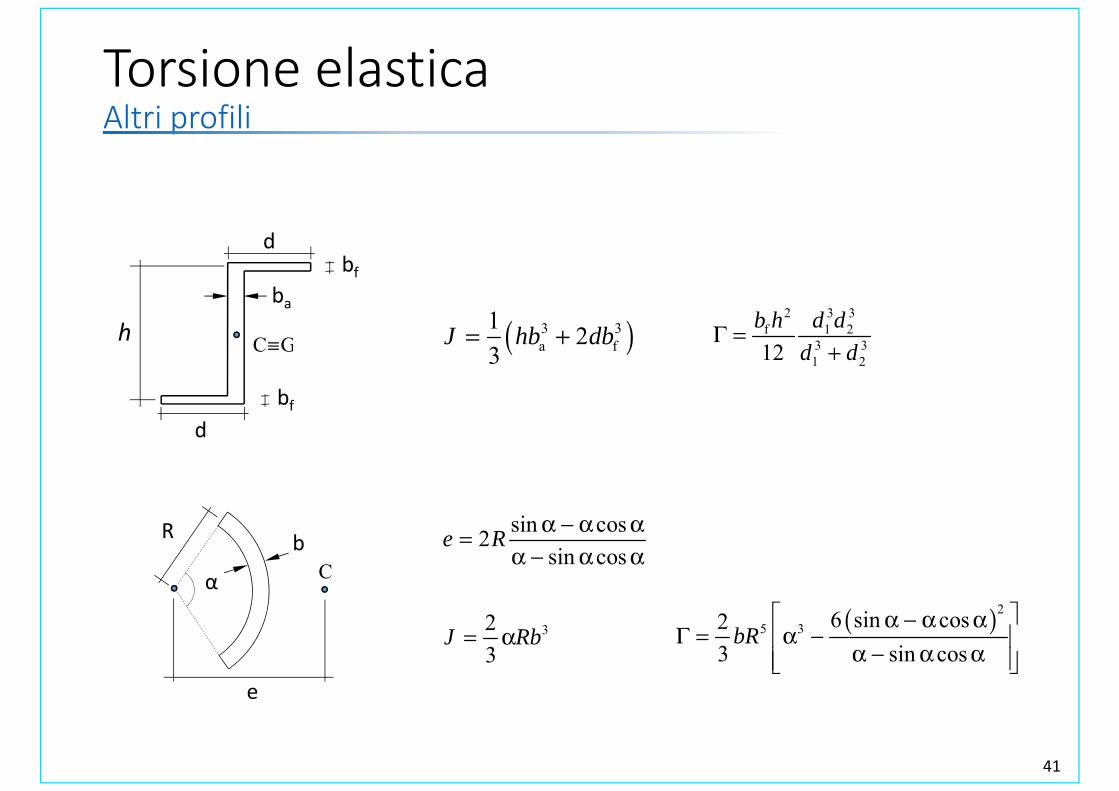
Torsione elasticaAltri profili
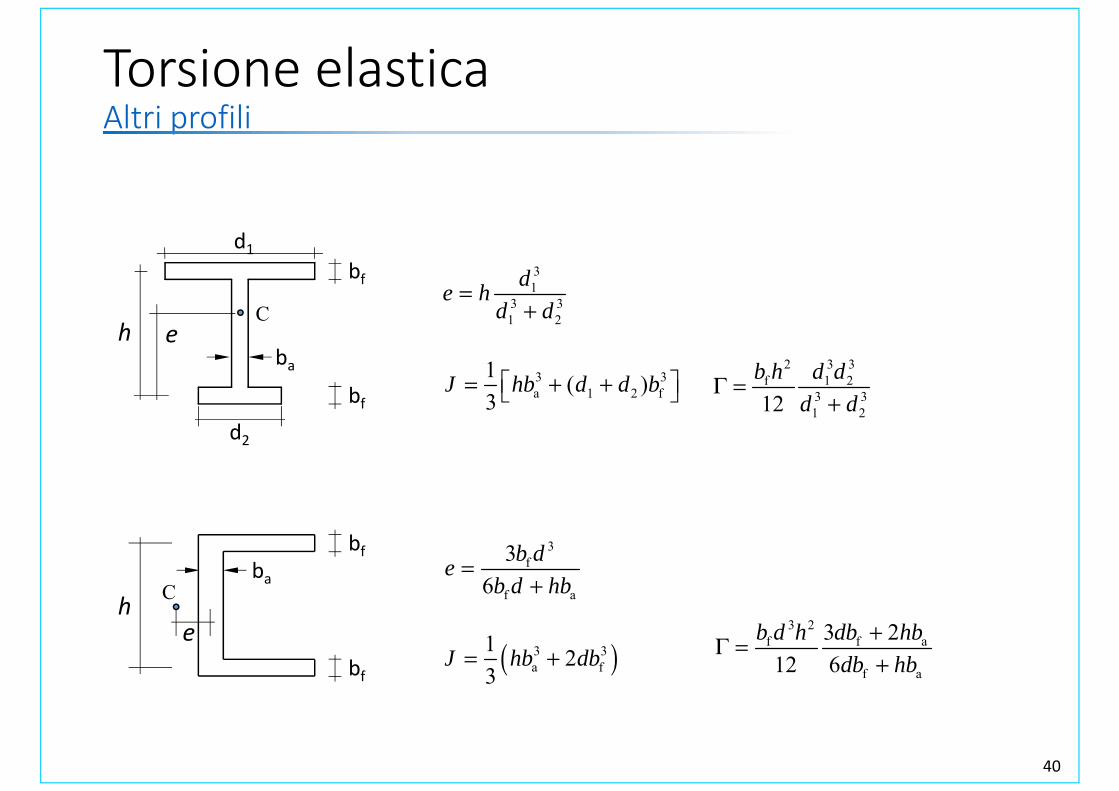
40
31
3 31 2
de hd d
=+
h3 3a 1 2 f
1 ( )3
J hb d d b = + + 2 3 3
f 1 23 31 212
b h d dd d
Γ =+
3f
f a
36
b deb d hb
=+
( )3 3a f
1 23
J hb db= +3 2
f f a
f a
3 212 6
b d h db hbdb hb
+Γ =+
d1
eC
bf
bf
d2
ba
h C
bf
bf
ba
e
Torsione elasticaAltri profili
41
2 3 3f 1 2
3 31 212
b h d dd d
Γ =+( )3 3
a f1 23
J hb db= +
sin cos2sin cos
e R α − α α=α − α α
( )25 3 6 sin cos2
3 sin cosbR
α − α αΓ = α −
α − α α
d
C G≡
bf
ba
323
J Rb= α
d
R
αb
e
C
bf
h
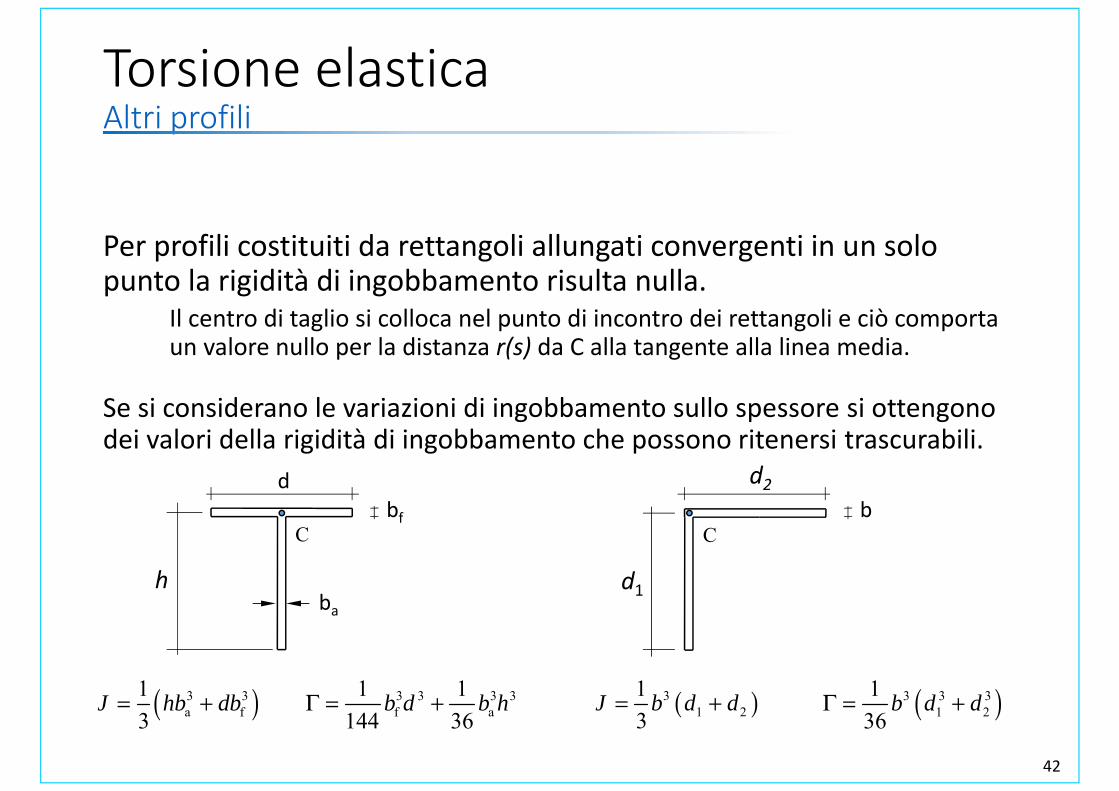
Torsione elasticaAltri profili
42
Per profili costituiti da rettangoli allungati convergenti in un solo punto la rigidità di ingobbamento risulta nulla.
h
d
C
ba
3 3 3 3f a
1 1144 36
b d b hΓ = +( )3 3a f
13
J hb db= +
d1
C
( )3 3 31 2
136
b d dΓ = +( )31 2
13
J b d d= +
d2
Se si considerano le variazioni di ingobbamento sullo spessore si ottengono dei valori della rigidità di ingobbamento che possono ritenersi trascurabili.
Il centro di taglio si colloca nel punto di incontro dei rettangoli e ciò comporta un valore nullo per la distanza r(s) da C alla tangente alla linea media.
bf b
Principali riferimenti
43
Leone Corradi Dell’Acqua. Meccanica delle strutture Volume 1 - Il comportamento dei corpi continui, Mc Graw Hill. ISBN: 978 88386 67145
Leone Corradi Dell’Acqua. Meccanica delle strutture - Volume 2 - Le teorie strutturali e il metodo degli elementi finiti, Mc Graw Hill. ISBN: 978 88386 67152
FINE
44