studio di massima e ottimizzazione del basamento di un ... internet/catalogo tesi/motori... ·...
TRANSCRIPT
Studio di massima e ottimizzazionedel basamento di un motore quattro cilindri
per uso aeronautico
Università degli Studi di Bologna
Tesi di laurea di: Relatore:PAOLO TESTI Prof. Ing. LUCA PIANCASTELLI
FACOLTA’ DI INGEGNERIACorso di Laurea in Ingegneria Meccanica
Laboratorio CAD L
Anno Accademico 2005-2006 – Seconda Sessione
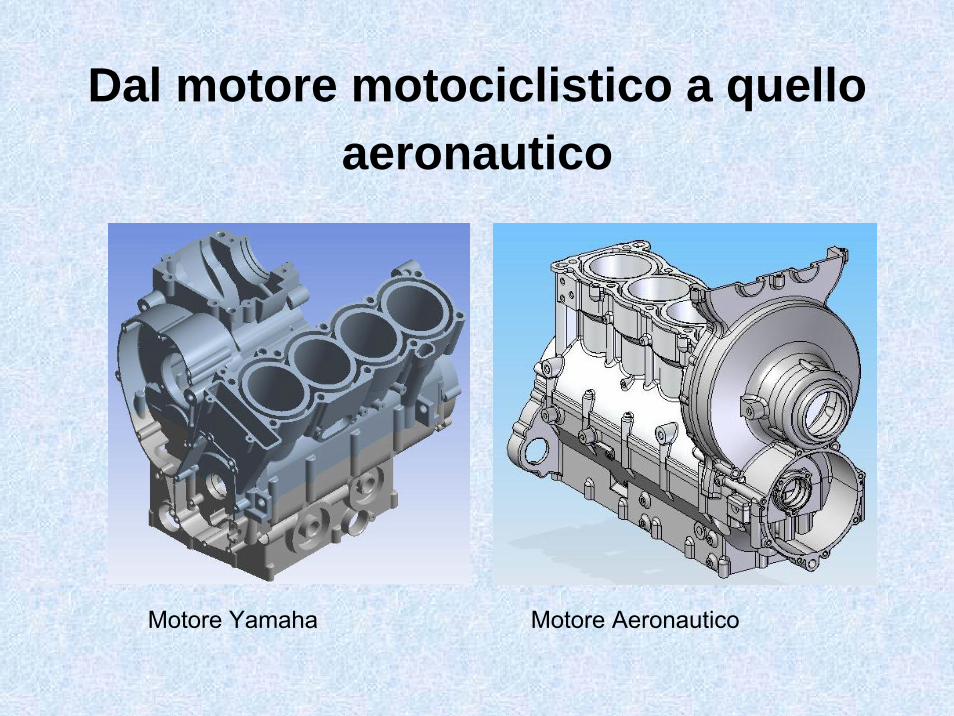
Dal motore motociclistico a quello aeronautico
Motore Yamaha Motore Aeronautico
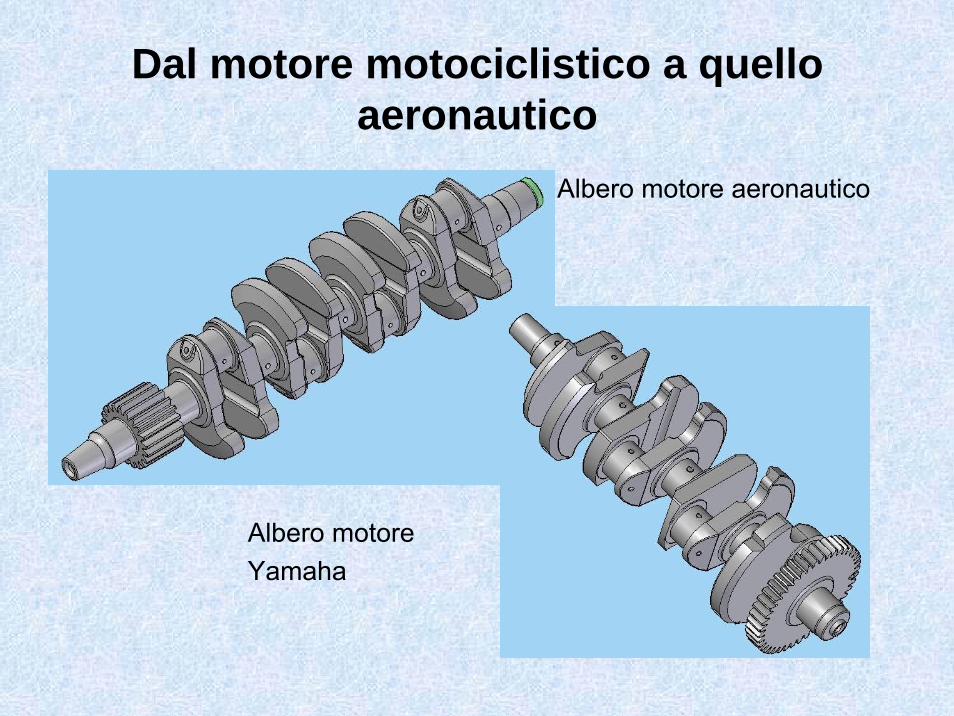
Dal motore motociclistico a quello aeronautico
Albero motore aeronautico
Albero motoreYamaha
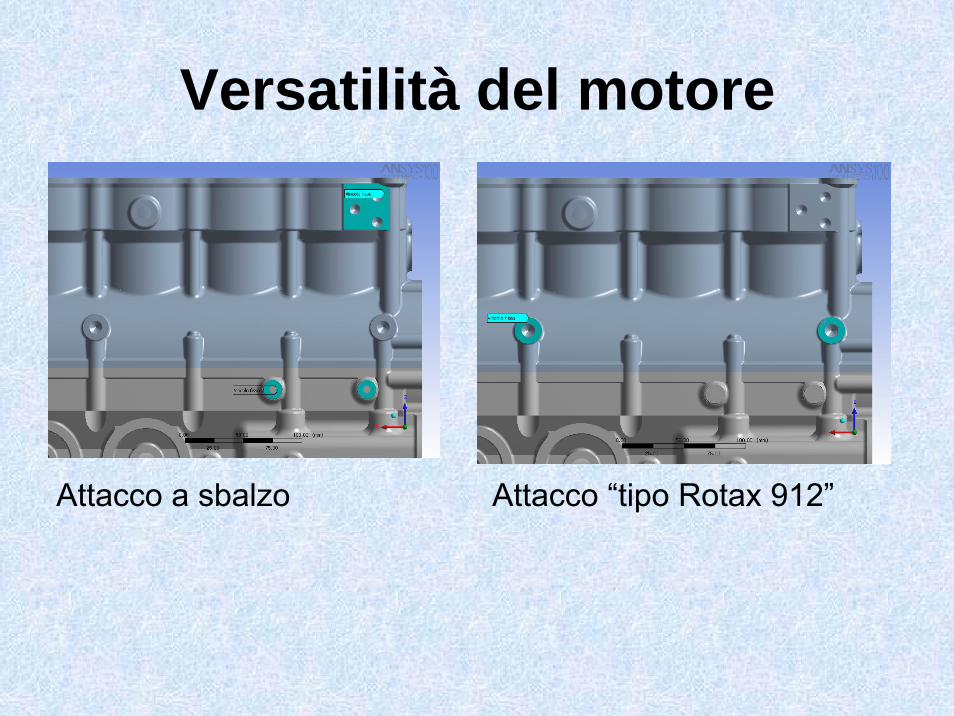
Versatilità del motore
Attacco a sbalzo Attacco “tipo Rotax 912”
Stima delle sollecitazioni• Momento giroscopico
J = momento d’inerzia massimo ottenuto dai dati del costruttoreB = rateo di manovra, ovvero l’unità di misura quantificante la variazione di rotta dalla traiettoria principale. Si assume B = π/3 rad/sec; ω= velocità angolare di rotazione dell’elica, espressa in rad /sec.
NmBJM G 3076022800
31 =⋅⋅⋅=⋅⋅=
ππω

Stima delle sollecitazioniForza di richiamata 6g
Massa equivalente testata Massa eq. albero motore
NmgFrichiamata 6,35316081,966 =⋅⋅=⋅⋅=
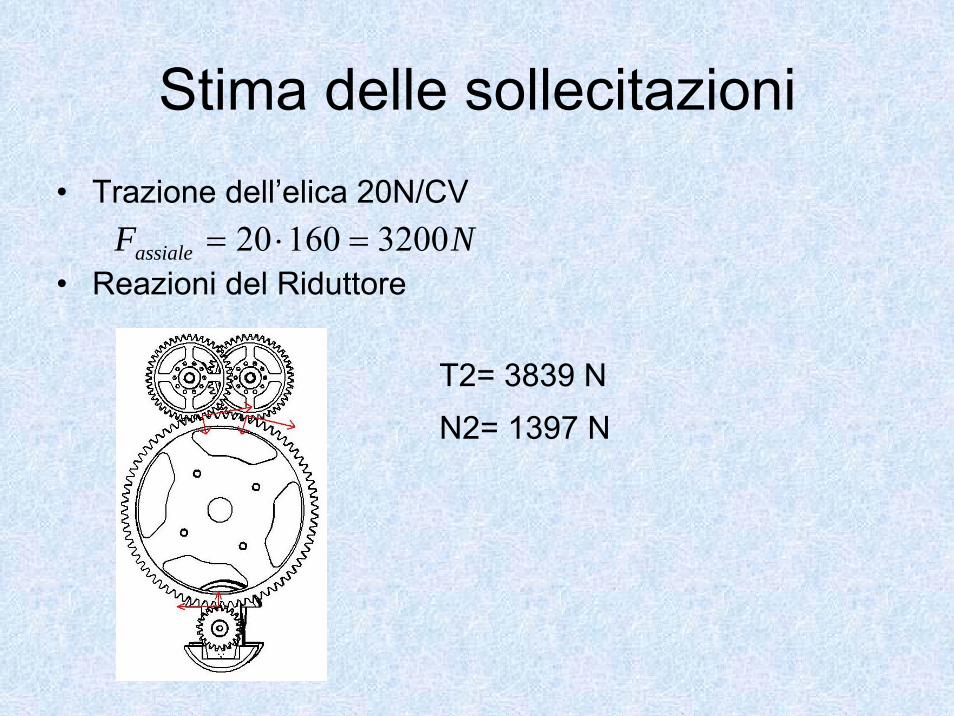
Stima delle sollecitazioni• Trazione dell’elica 20N/CV
• Reazioni del Riduttore
T2= 3839 NN2= 1397 N
NFassiale 320016020 =⋅=

Stima delle sollecitazioni
• Calcolo con gli elementi finiti delle reazioni delle forze di pressione sul basamento
Verifica agli elementi finiti
Procedimento di lavoro • Verifica del caso peggiore in accordo con le
specifiche del materiale • Calcolo dello scostamento tra la deformata reale
e quella teoricamente desiderabile (i perni di banco rimangono lungo una retta)
• Confronto con quelle ottenute sul motore Yamaha sottoposto ai medesimi carichi
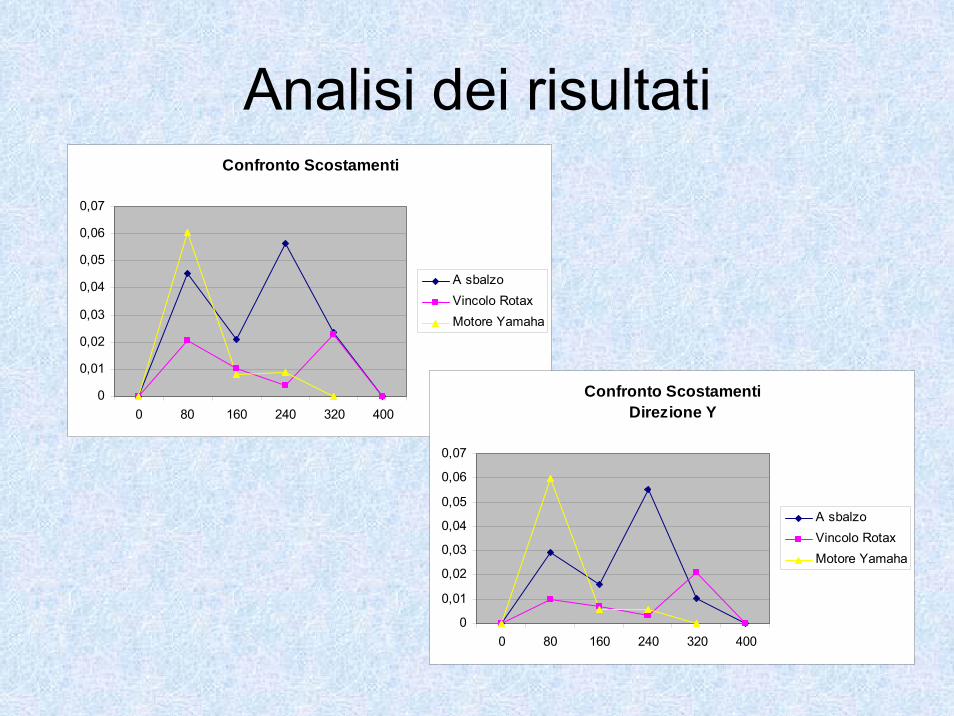
Analisi dei risultatiConfronto Scostamenti
0
0,01
0,02
0,03
0,04
0,05
0,06
0,07
0 80 160 240 320 400
A sbalzoVincolo RotaxMotore Yamaha
Confronto ScostamentiDirezione Y
0
0,01
0,02
0,03
0,04
0,05
0,06
0,07
0 80 160 240 320 400
A sbalzoVincolo RotaxMotore Yamaha
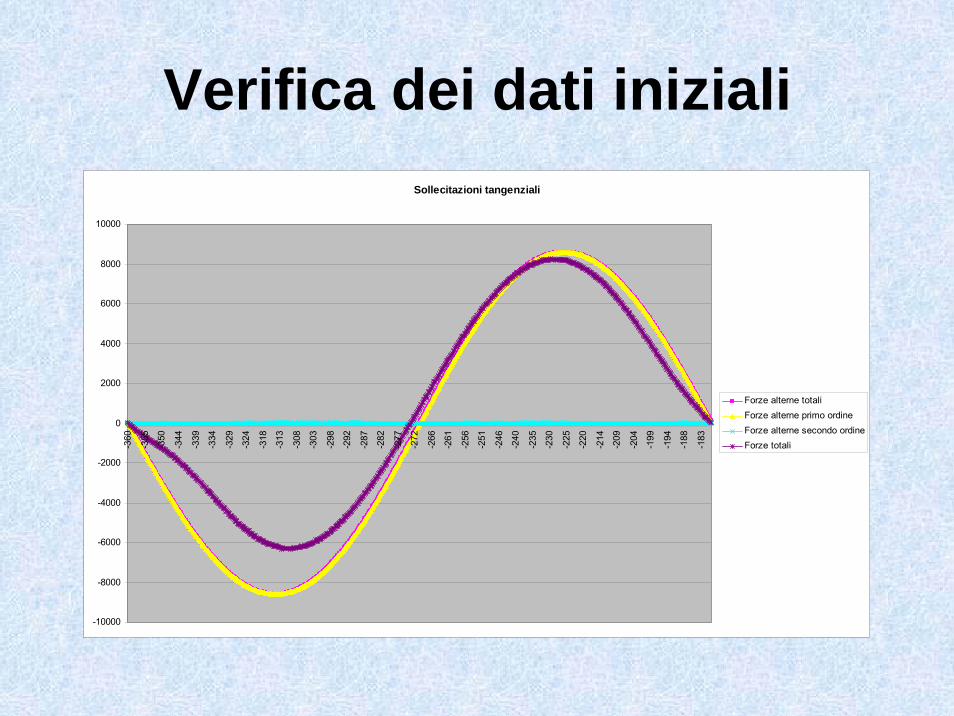
Verifica dei dati inizialiSollecitazioni tangenziali
-10000
-8000
-6000
-4000
-2000
0
2000
4000
6000
8000
10000
-360
-355
-350
-344
-339
-334
-329
-324
-318
-313
-308
-303
-298
-292
-287
-282
-277
-272
-266
-261
-256
-251
-246
-240
-235
-230
-225
-220
-214
-209
-204
-199
-194
-188
-183
Forze alterne totaliForze alterne primo ordineForze alterne secondo ordineForze totali
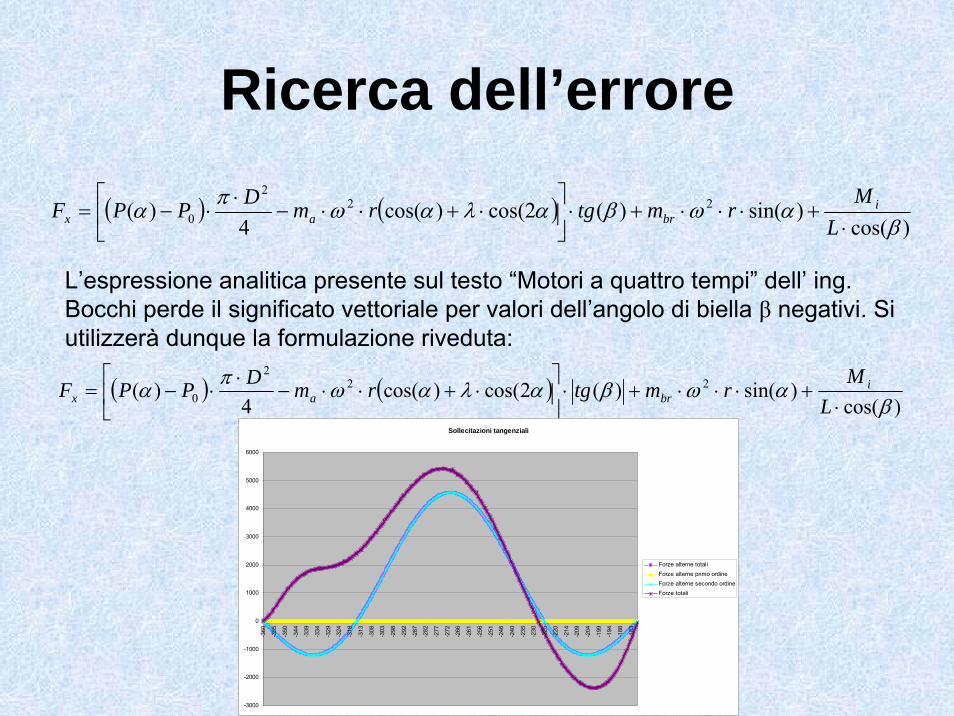
Ricerca dell’errore
( ) ( ))cos(
)sin()(2cos()cos(4
)( 222
0 βαωβαλαωπα
⋅+⋅⋅⋅+⋅⎥
⎦
⎤⎢⎣
⎡⋅+⋅⋅−
⋅⋅−=
LM
rmtgrmDPPF ibrax
L’espressione analitica presente sul testo “Motori a quattro tempi” dell’ ing. Bocchi perde il significato vettoriale per valori dell’angolo di biella β negativi. Si utilizzerà dunque la formulazione riveduta:
( ) ( ))cos(
)sin()(2cos()cos(4
)( 222
0 βαωβαλαωπα
⋅+⋅⋅⋅+⋅⎥
⎦
⎤⎢⎣
⎡⋅+⋅⋅−
⋅⋅−=
LM
rmtgrmDPPF ibrax
Sollecitazioni tangenziali
-3000
-2000
-1000
0
1000
2000
3000
4000
5000
6000
-360
-355
-350
-344
-339
-334
-329
-324
-318
-313
-308
-303
-298
-292
-287
-282
-277
-272
-266
-261
-256
-251
-246
-240
-235
-230
-225
-220
-214
-209
-204
-199
-194
-188
-183
Forze alterne totaliForze alterne primo ordineForze alterne secondo ordineForze totali
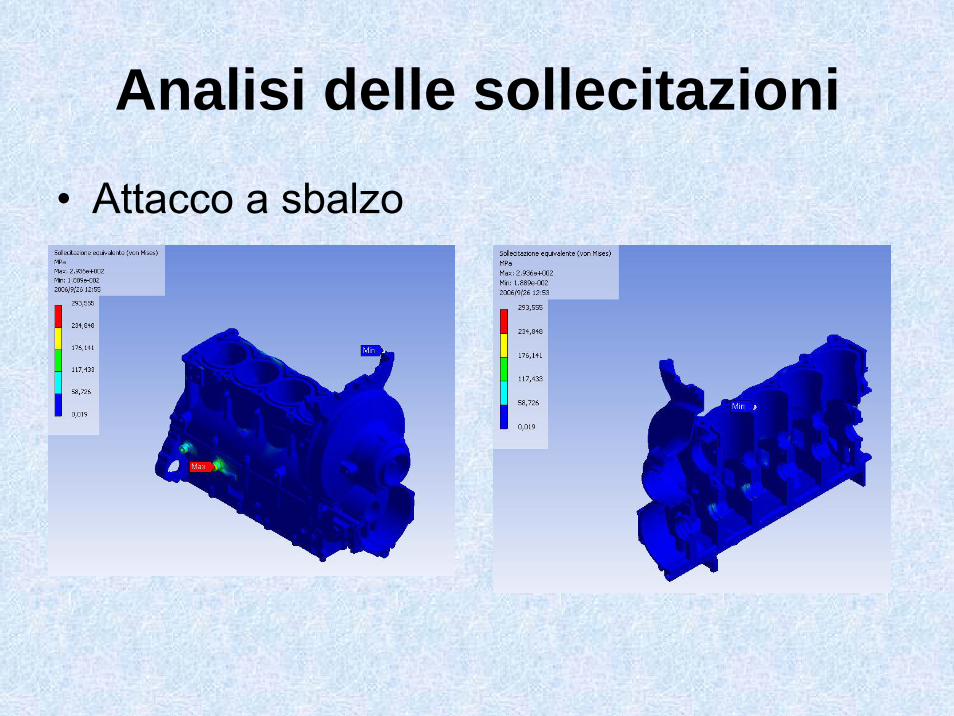
Analisi delle sollecitazioni
• Attacco a sbalzo
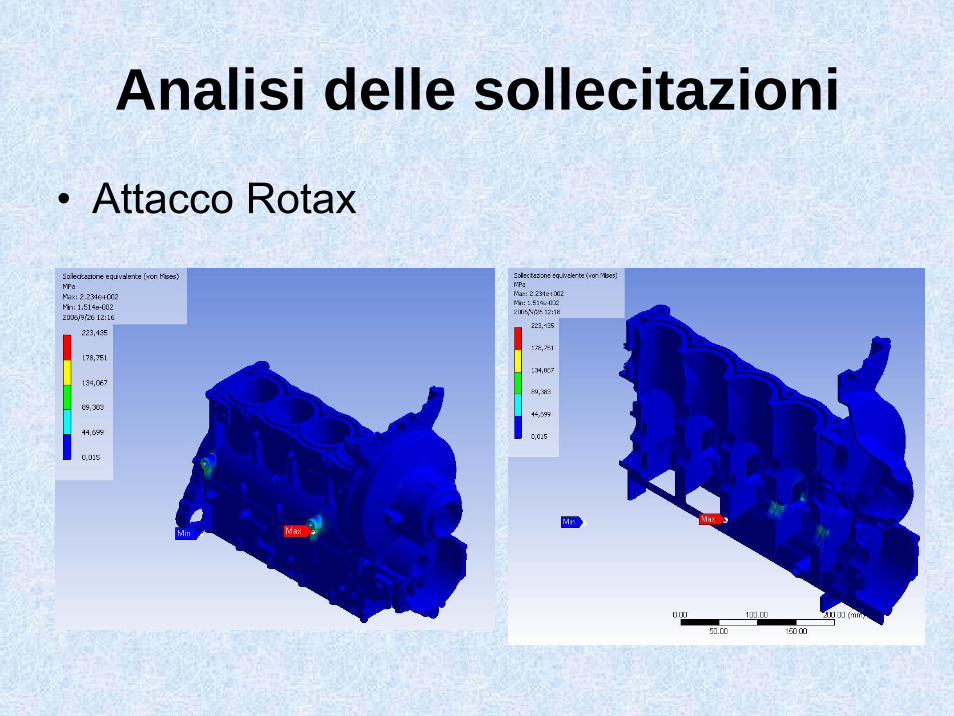
Analisi delle sollecitazioni
• Attacco Rotax
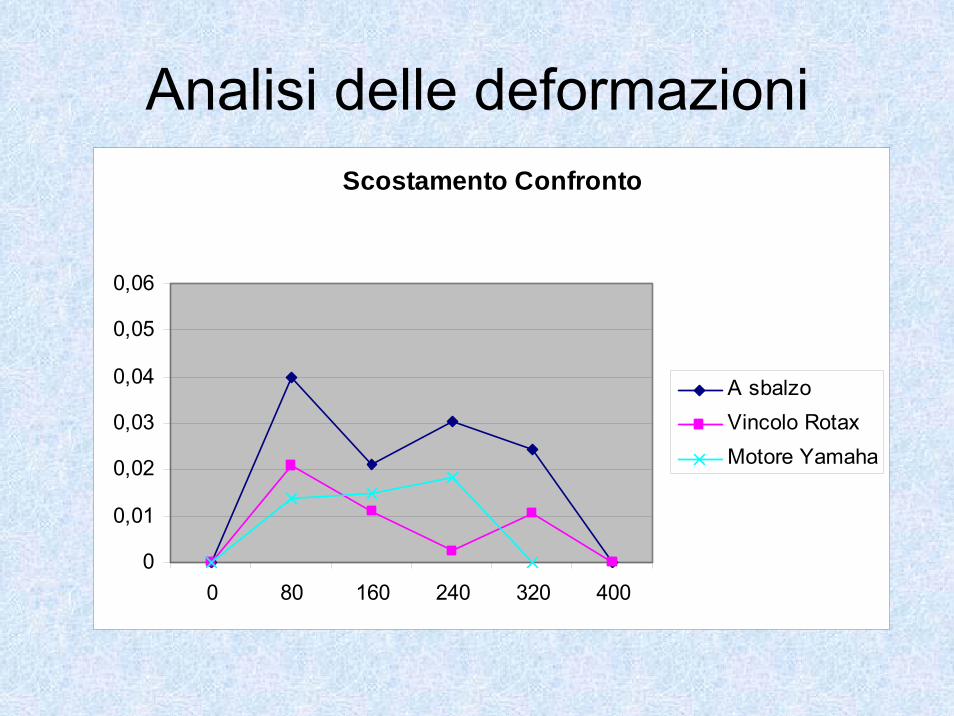
Analisi delle deformazioniScostamento Confronto
0
0,01
0,02
0,03
0,04
0,05
0,06
0 80 160 240 320 400
A sbalzoVincolo RotaxMotore Yamaha
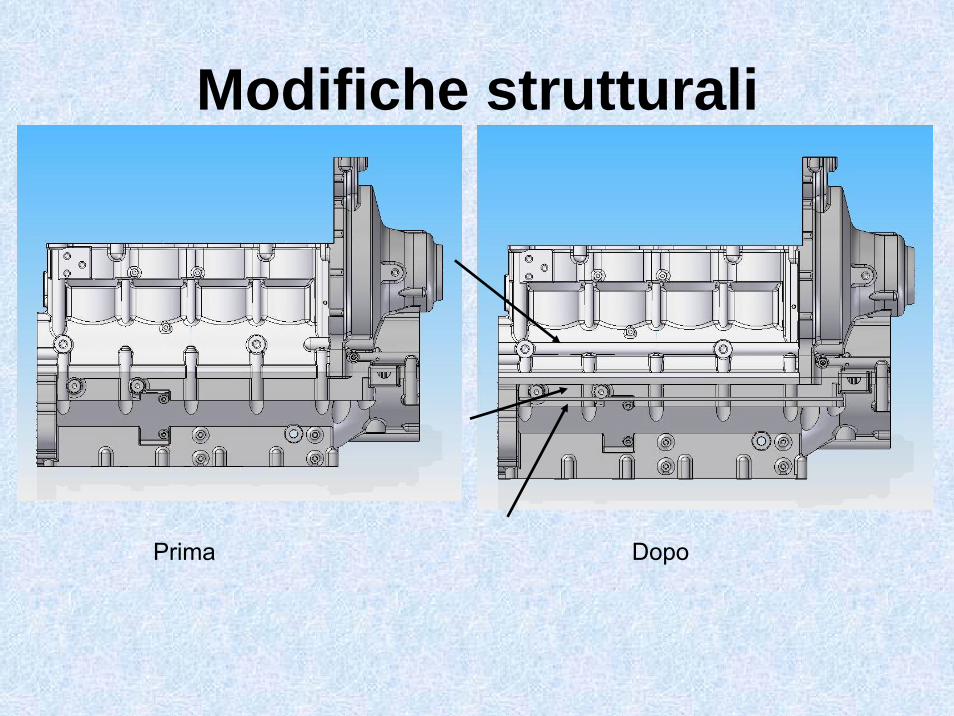
Modifiche strutturali
Prima Dopo
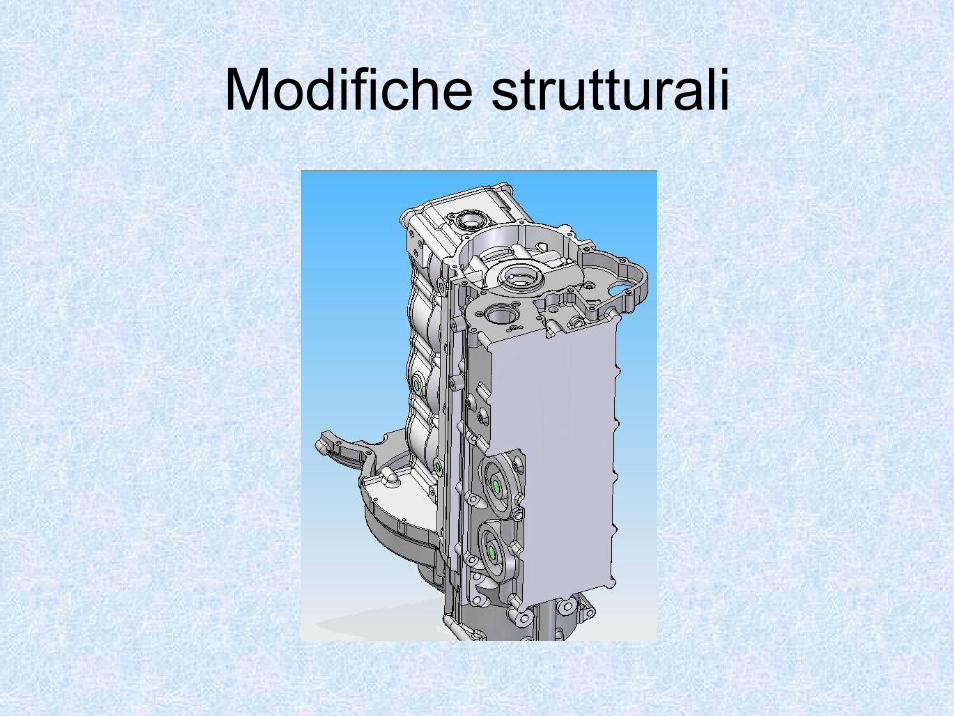
Modifiche strutturali
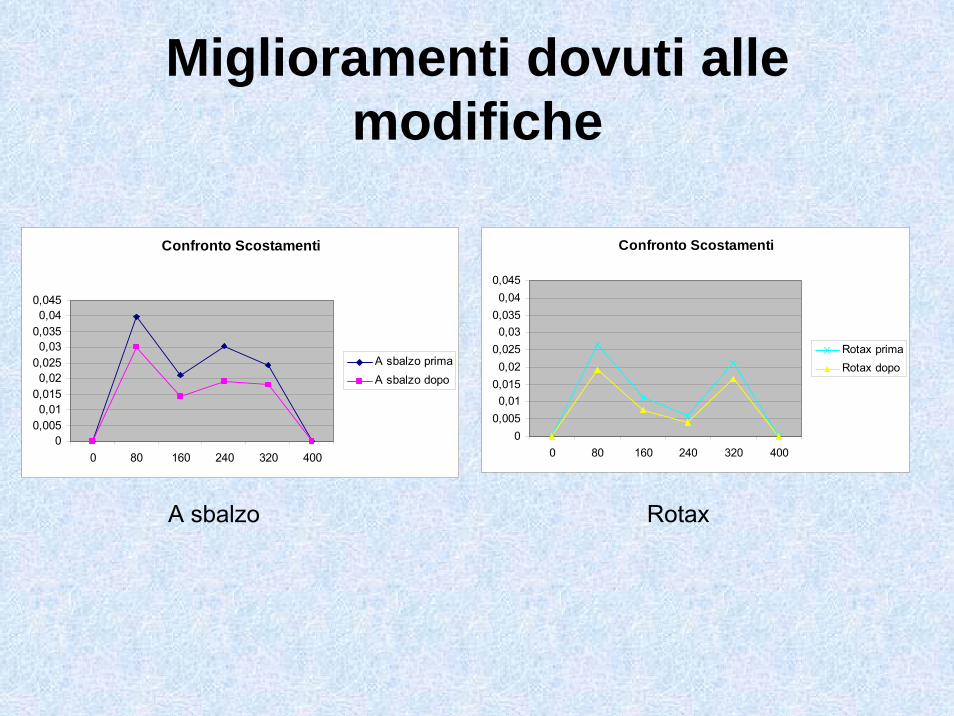
Miglioramenti dovuti alle modifiche
Confronto Scostamenti
00,0050,01
0,0150,02
0,0250,03
0,0350,04
0,045
0 80 160 240 320 400
A sbalzo primaA sbalzo dopo
A sbalzo Rotax
Confronto Scostamenti
00,0050,01
0,0150,02
0,0250,03
0,0350,04
0,045
0 80 160 240 320 400
Rotax primaRotax dopo
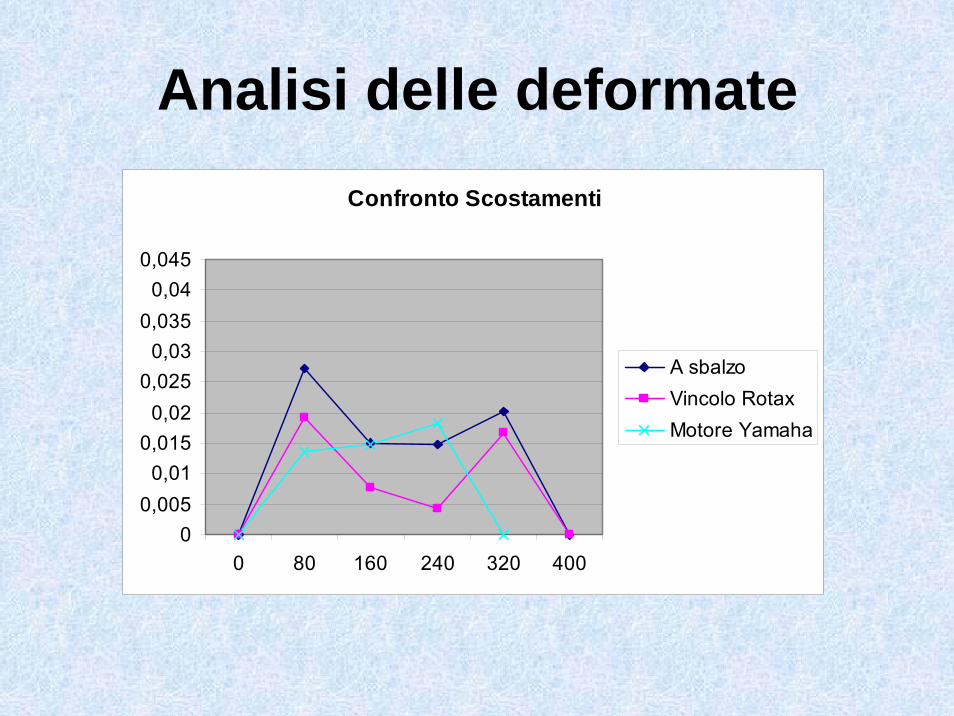
Analisi delle deformateConfronto Scostamenti
00,005
0,010,015
0,020,025
0,030,035
0,040,045
0 80 160 240 320 400
A sbalzoVincolo RotaxMotore Yamaha
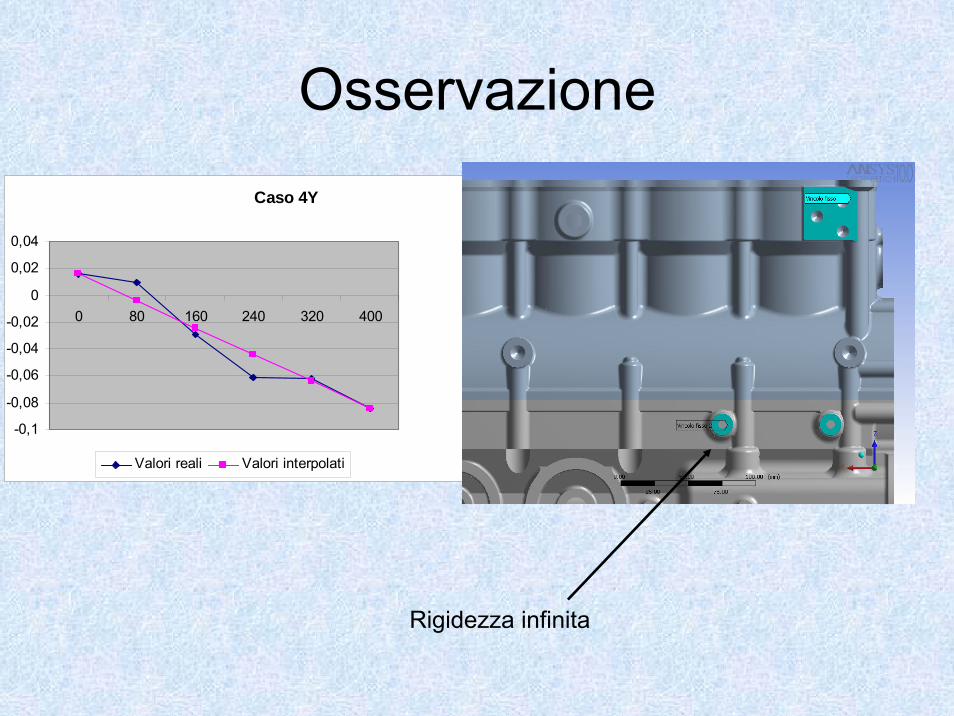
OsservazioneCaso 4Y
-0,1
-0,08
-0,06
-0,04
-0,02
0
0,02
0,04
0 80 160 240 320 400
Valori reali Valori interpolati
Rigidezza infinita
Conclusione• Con l’attacco “ tipo Rotax 912” il motore
possiede i requisiti richiesti • Con l’attacco a sbalzo non possiede al
momento i valori di rigidezza richiesti anche se: - il coperchio della coppa sarà
sicuramente più rigido di quello preso in quest’analisi
- l’attacco sarà sicuramente meno rigido di quello preso dal solutore